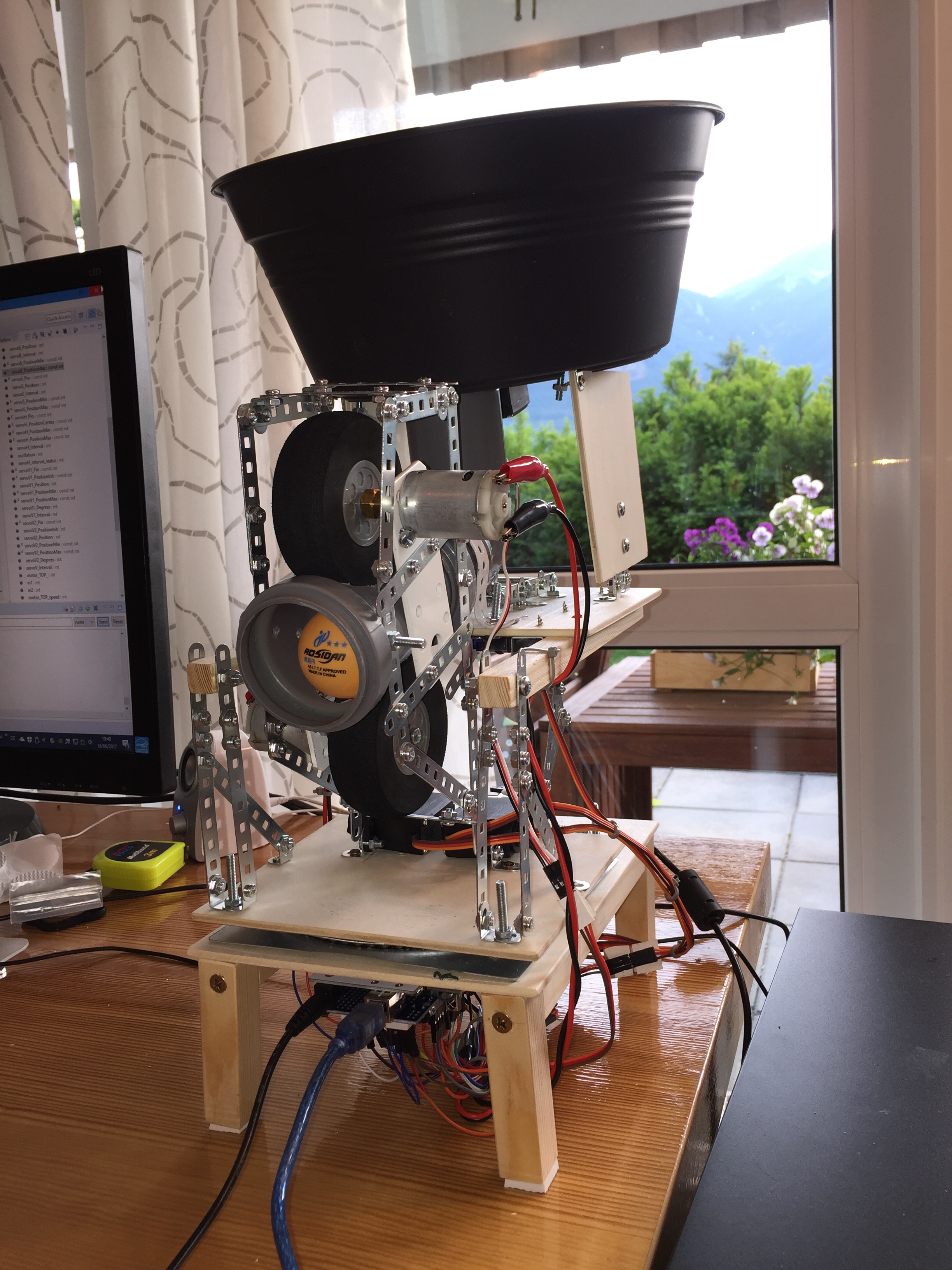
Balls recycling: the balls container is full with about 60 balls; for a regular exercice that means a duration of 1 minute . It would be nice to have a reciclyng system to bring back the balls into the top container.
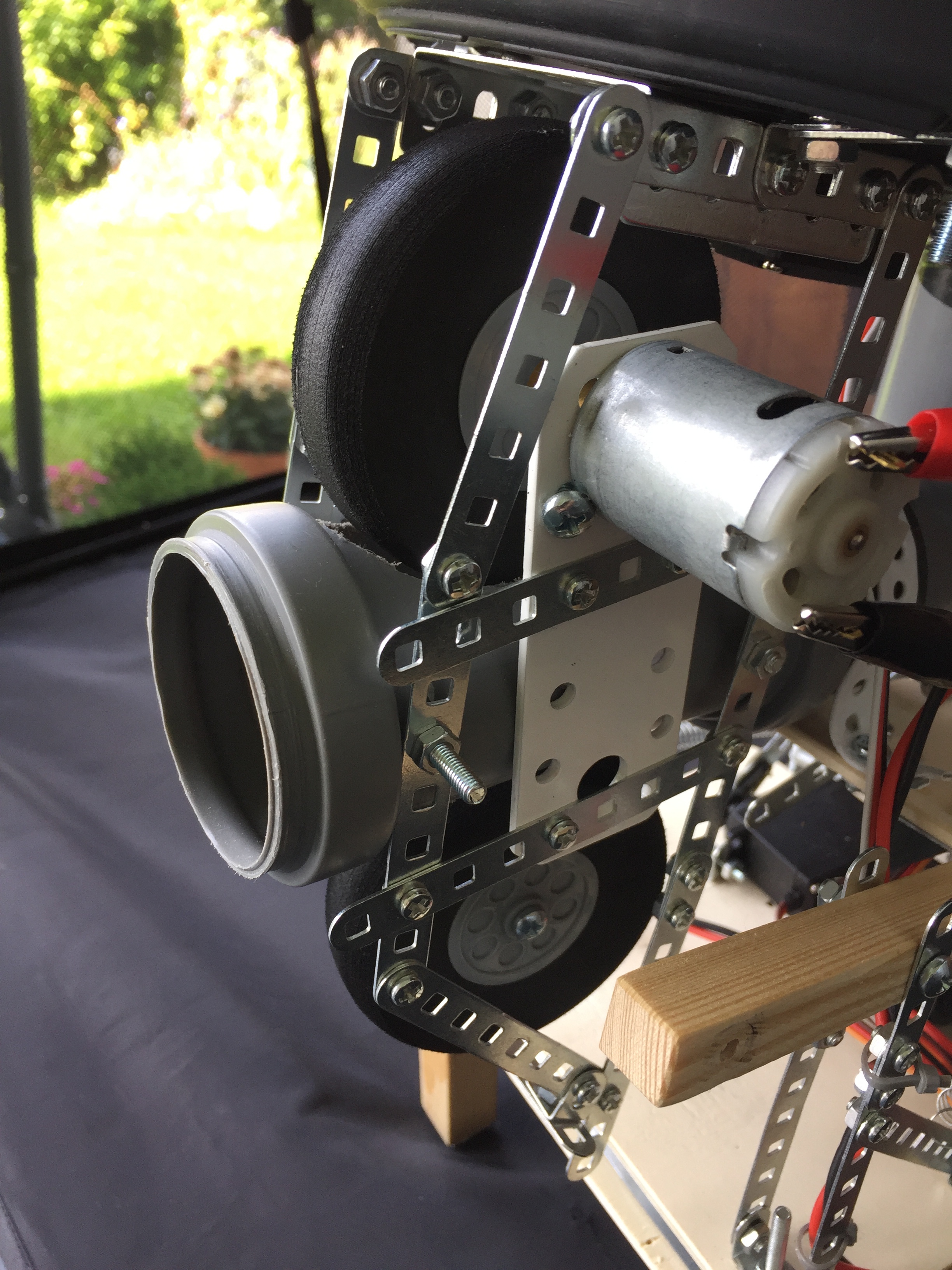
Review of the design: support of side spin (3 wheels).
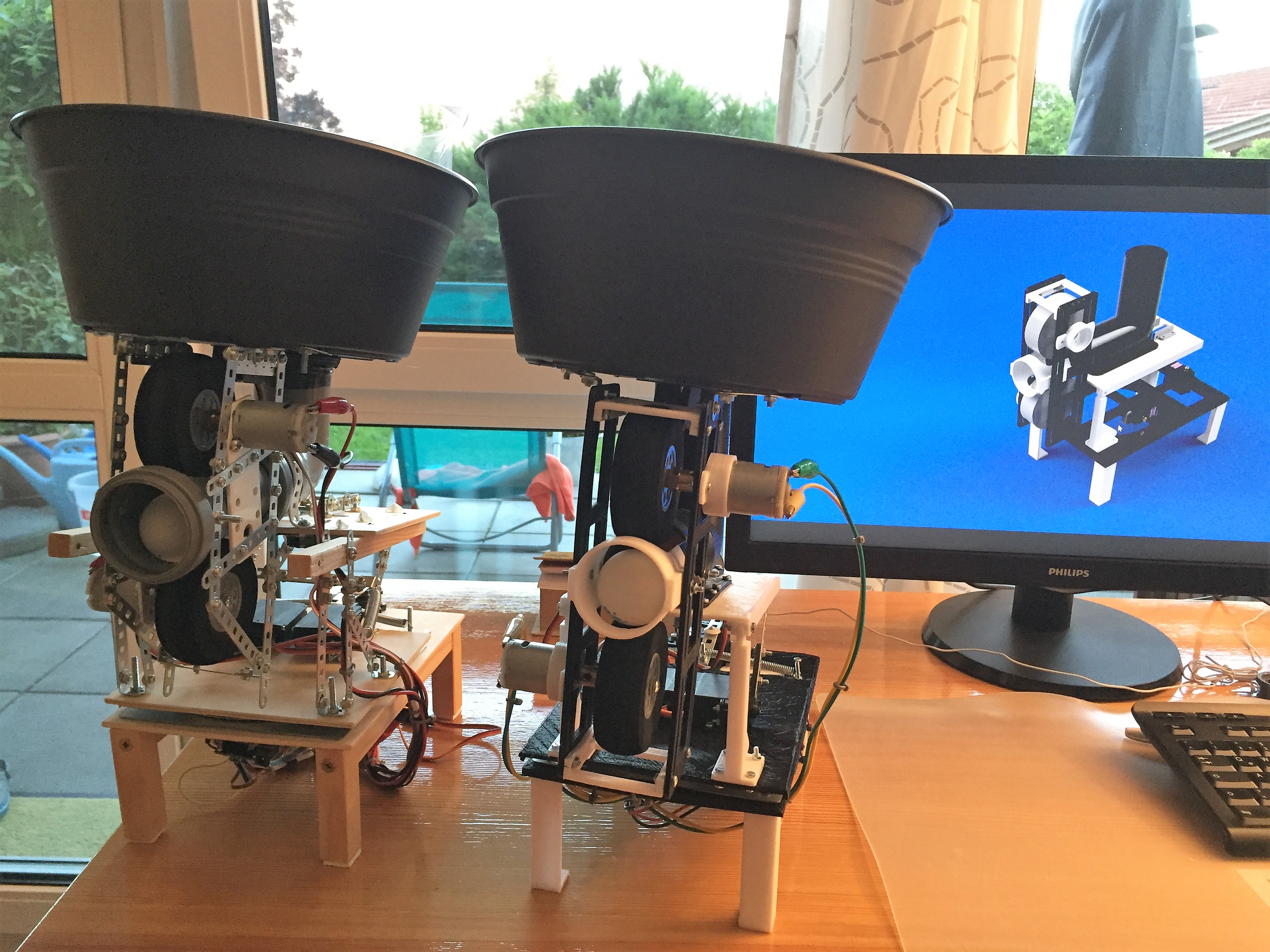
New model built with 3D printed components: possibility to create a clone within minutes assembling few parts.
The demo videos
Furobot is also enabled to receive voice commands with Amazon Echo. e.g. Alexa! turn oscillation ON/OFF
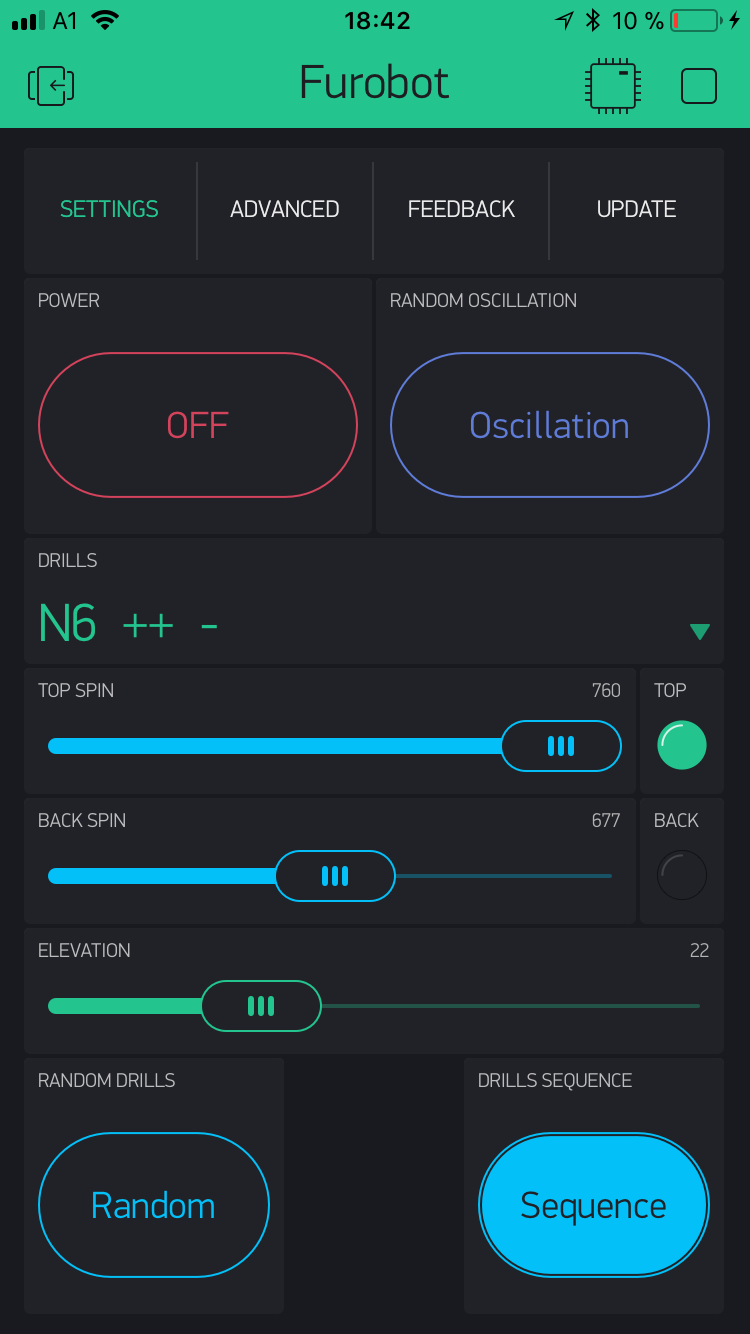
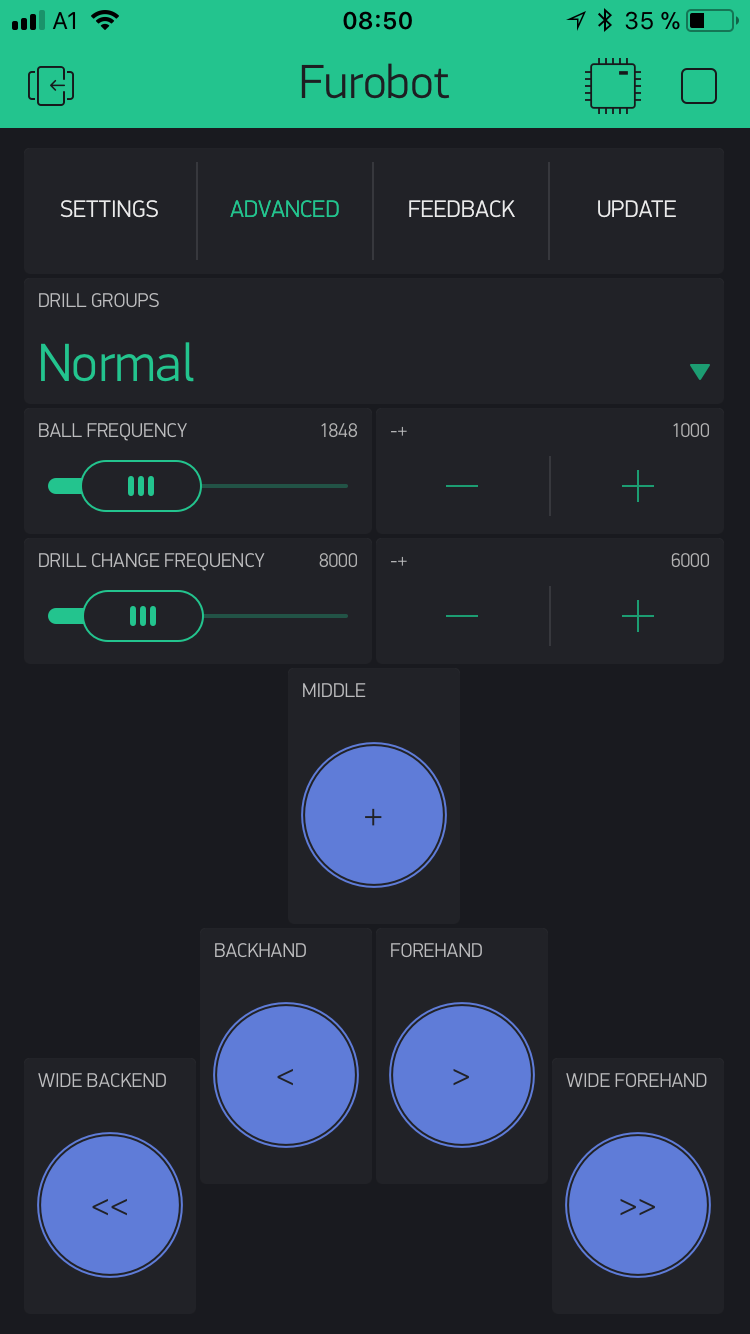
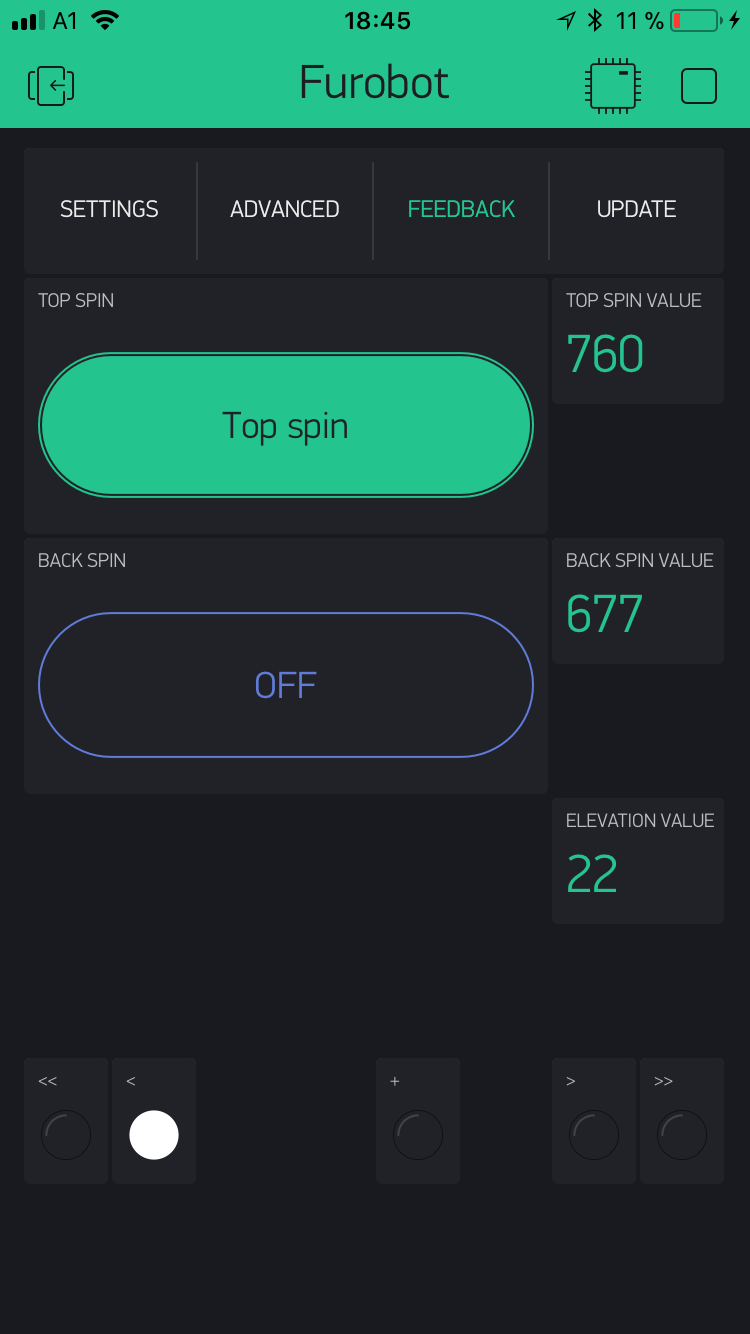
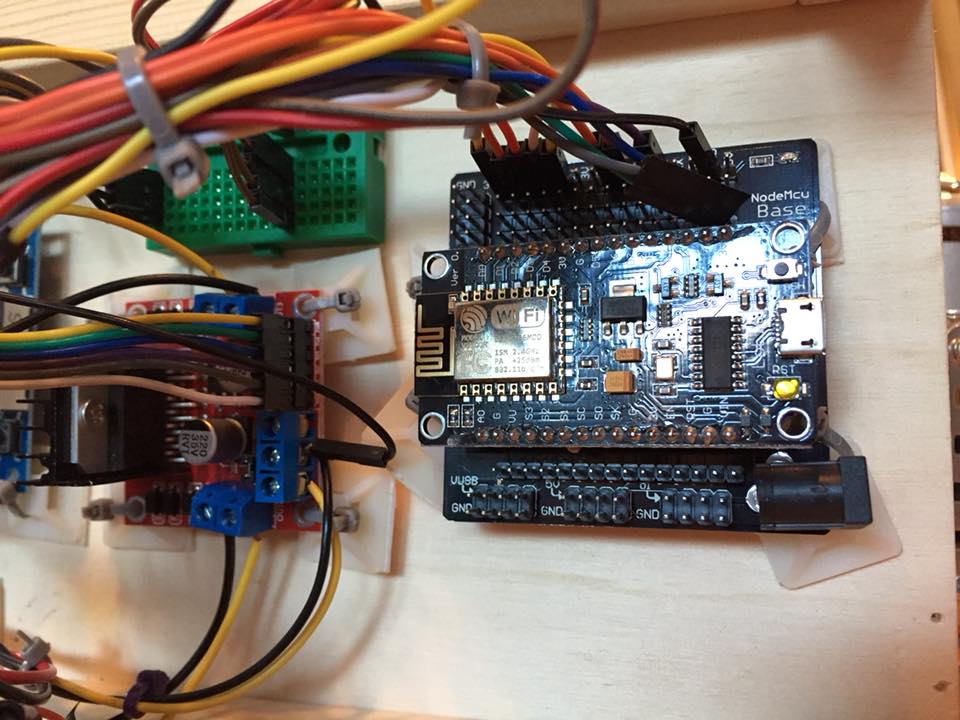
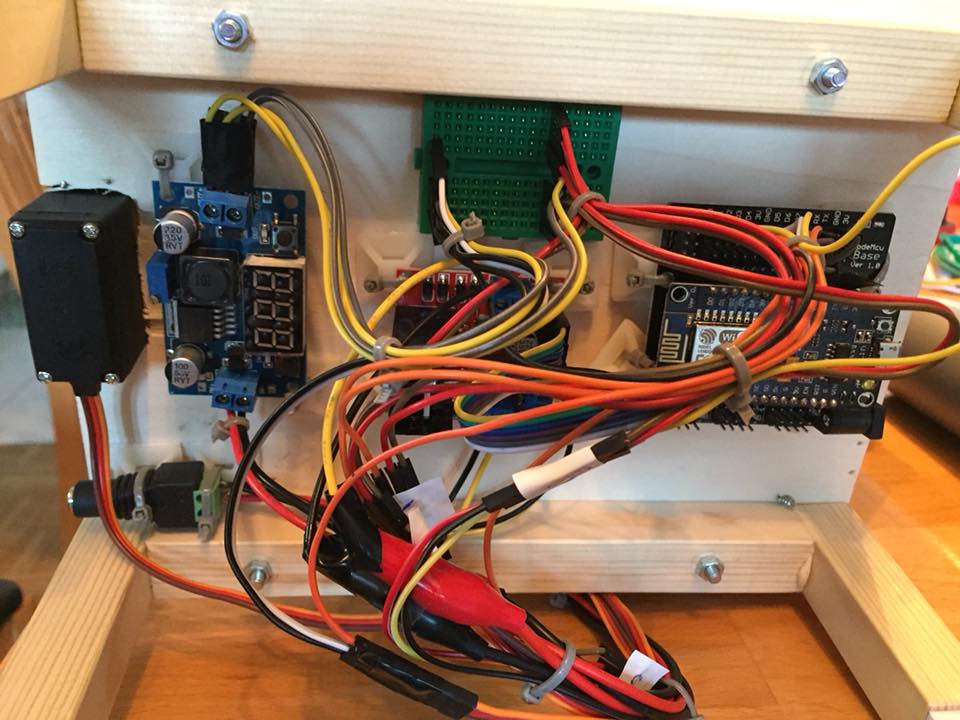
Initially the robot was controlled by an Arduino board with a IR remote control. Thanks to Blynk the porting to NodeMcu and wifi app has been straightforward exercice
Thank you! According to youtube most of the users are not watching the video to the end…too bad for them
For the side effects meanwhile I bought a net; as next step I’m planning to build a reciclyng system to bring back the balls into the top container.
Thanks for the suggestion! My idea until now was to build something with a vertical pipe and push the balls from the bottom to the top with a servo motor. Should not be required much power for that… The issues is to find the way to bring consistently the balls in front of the servo at the entrance of the pipe. I didnt try yet, but I would say… it is urgent!
I’m back with an update about the planned features
Planned features:
Balls recycling: the balls container is full with about 60 balls; for a regular exercice that means a duration of 1 minute . It would be nice to have a reciclyng system to bring back the balls into the top container.
The balls recycler has been designed, printed and tested indoor. At the moment there is snow in my garden , the final test on the field will be possible in April. At this point in time the post could be renamed as “Table tennis robot - 2 NodeMcu - 8 motors”
New model built with 3D printed components: possibility to create a clone within minutes assembling few parts._
The clone is in preparation, printing the parts and waiting the delivery of the missing electronic components.
Instead of clone I would better call it Furobot partner, because the idea is to have 2 robots working in sync to shoot balls from different spots. Thanks to blynk, each robot should shoot a ball about every second, without overlapping with the other one… that is challenging… If that works I have “2 Table tennis robots in sync - 4 NodeMcu - 16 motors”; otherwise just a spare robot
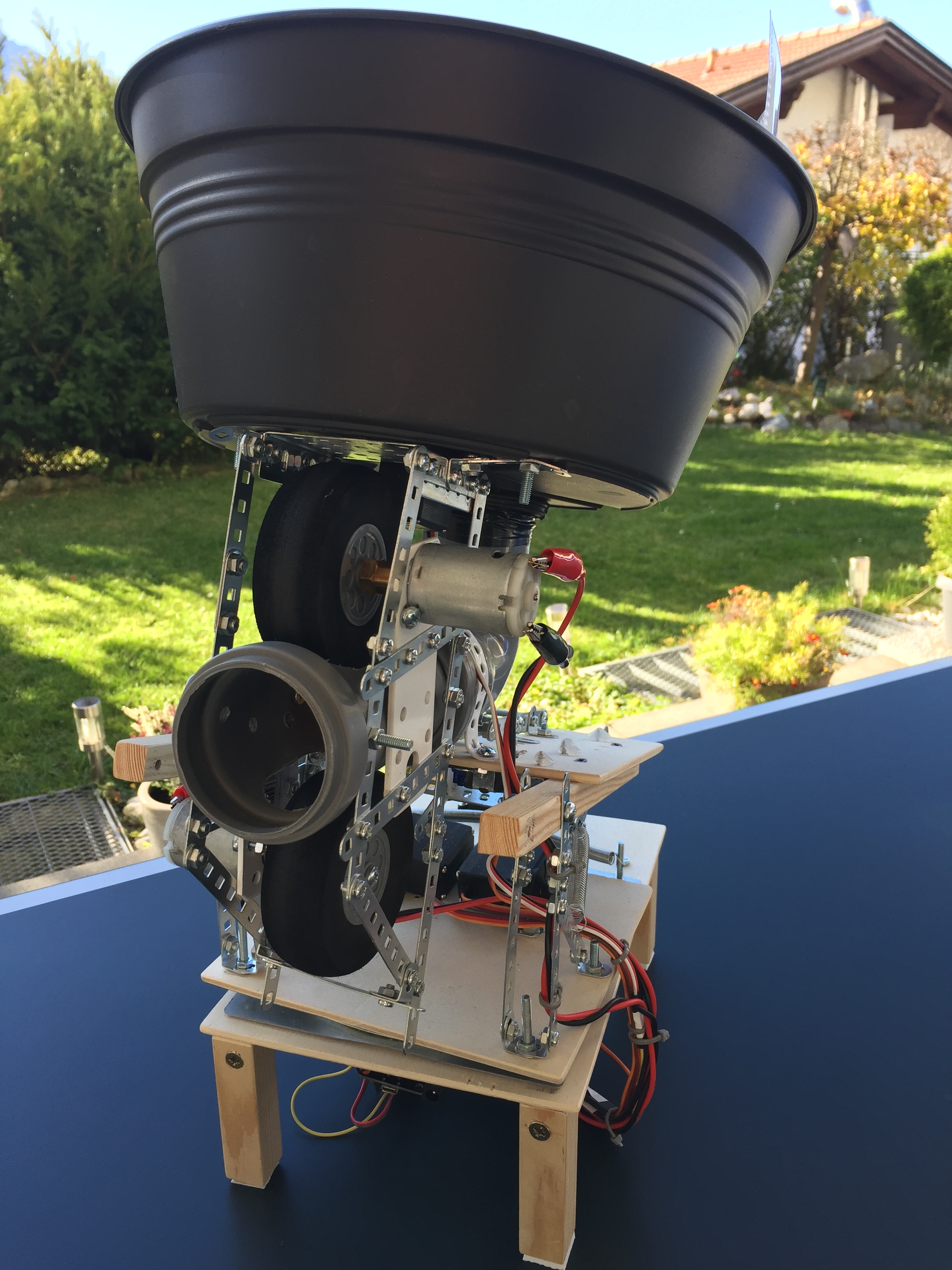
So… did you intend it to look like a dog? I had to look thrice because my first thoughts where… how can that robot dog walk without movable legs … then I checked the topic title and zoomed into the picture
EDIT, I guess it looked like this all along, just appeared to me like a sort of dog (with a funny tail) without the feeder bin and stuff attached… sorry no insult of your design intended.
 . It would be nice to have a reciclyng system to bring back the balls into the top container.
. It would be nice to have a reciclyng system to bring back the balls into the top container.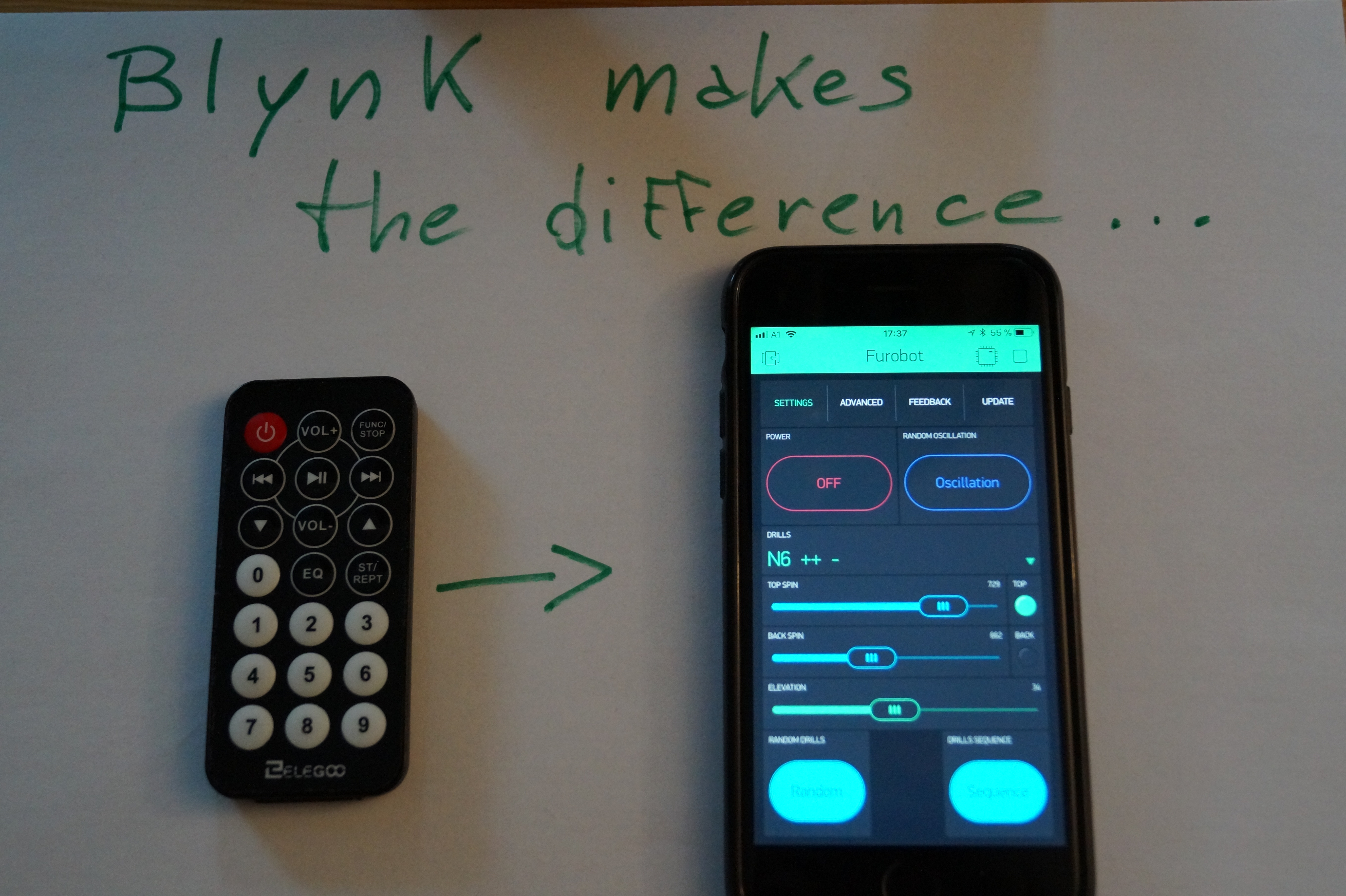




 Great work!!
Great work!!




 e.g.
e.g. 

 , the final test on the field will be possible in April. At this point in time the post could be renamed as “Table tennis robot - 2 NodeMcu - 8 motors”
, the final test on the field will be possible in April. At this point in time the post could be renamed as “Table tennis robot - 2 NodeMcu - 8 motors”