@joeson07 In the next days I will draw a diagram and collect some code.
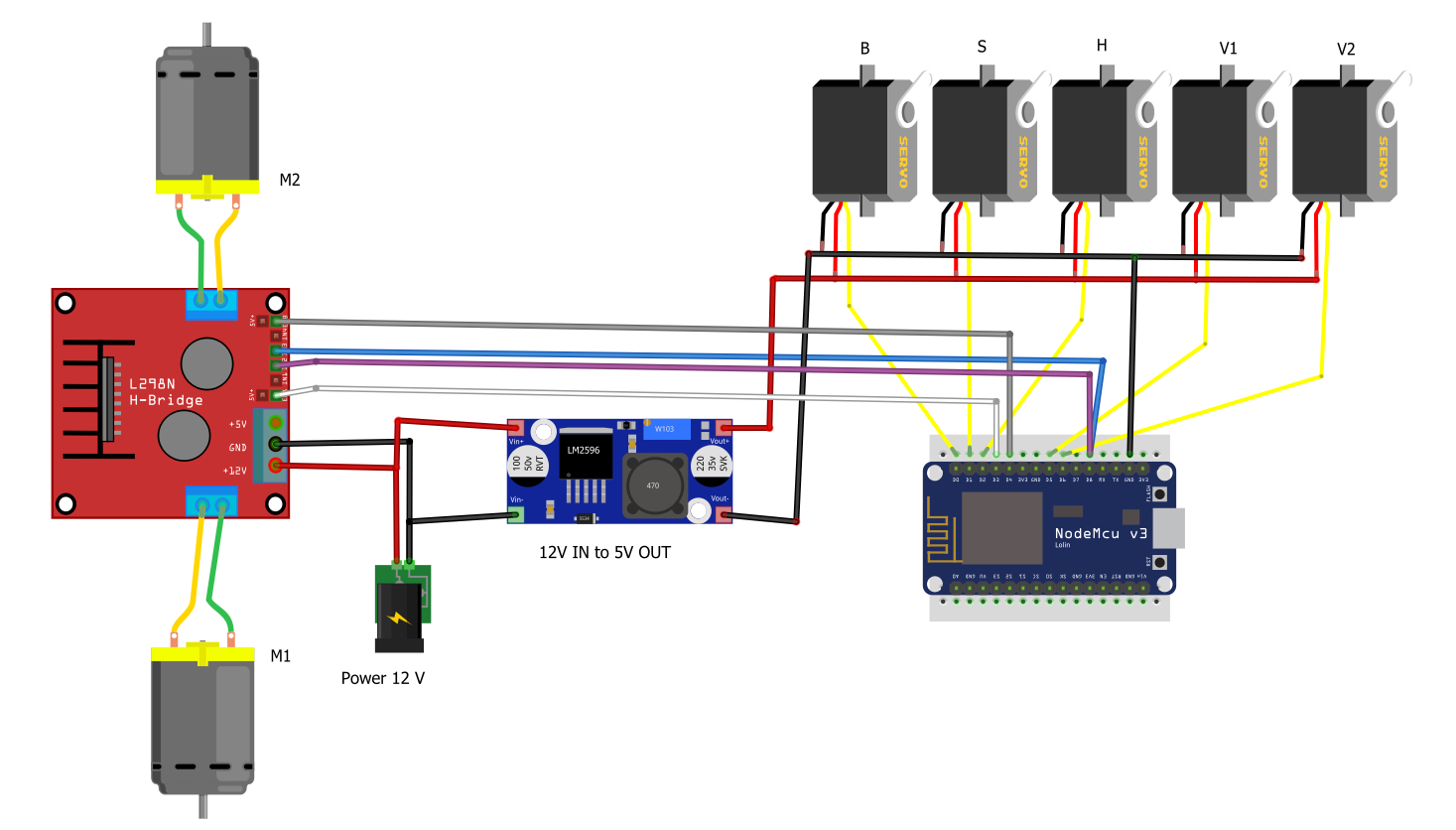
Thank you for the code and the shematics, very helpful!
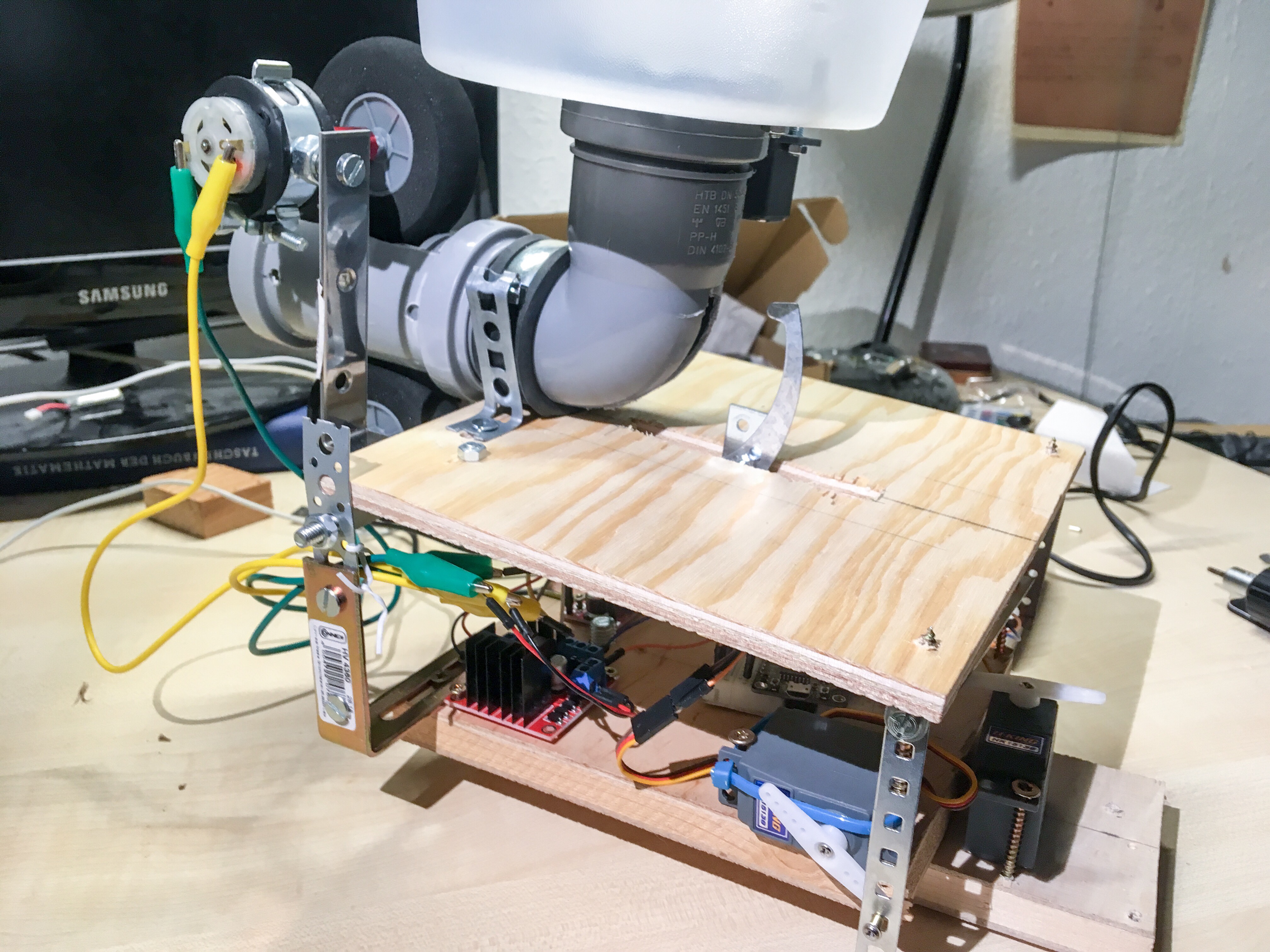
Both works almost good, but not easy to rebuild your robot. Especially the functions inside the tube are not clear. Looks like there is a spring at the end, i am still testing… makes lot of fun!
Hi @radla, the balls are coming down and pushed forward to the wheels by the SG90 servo (no spring).
I’m looking forward to seeing your robot!
Can you provide me the detail drawing?
Hi Paolo,
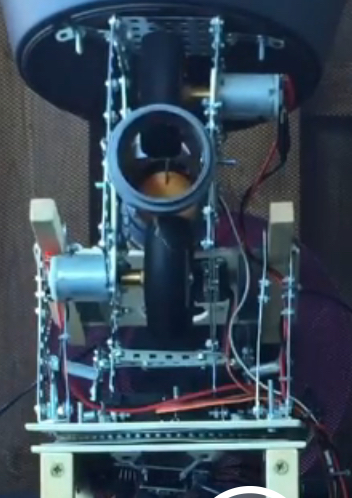
in your video at 01:51 there is a dark line before the ball, thats what i mean. What did you use for this? (see on last image)
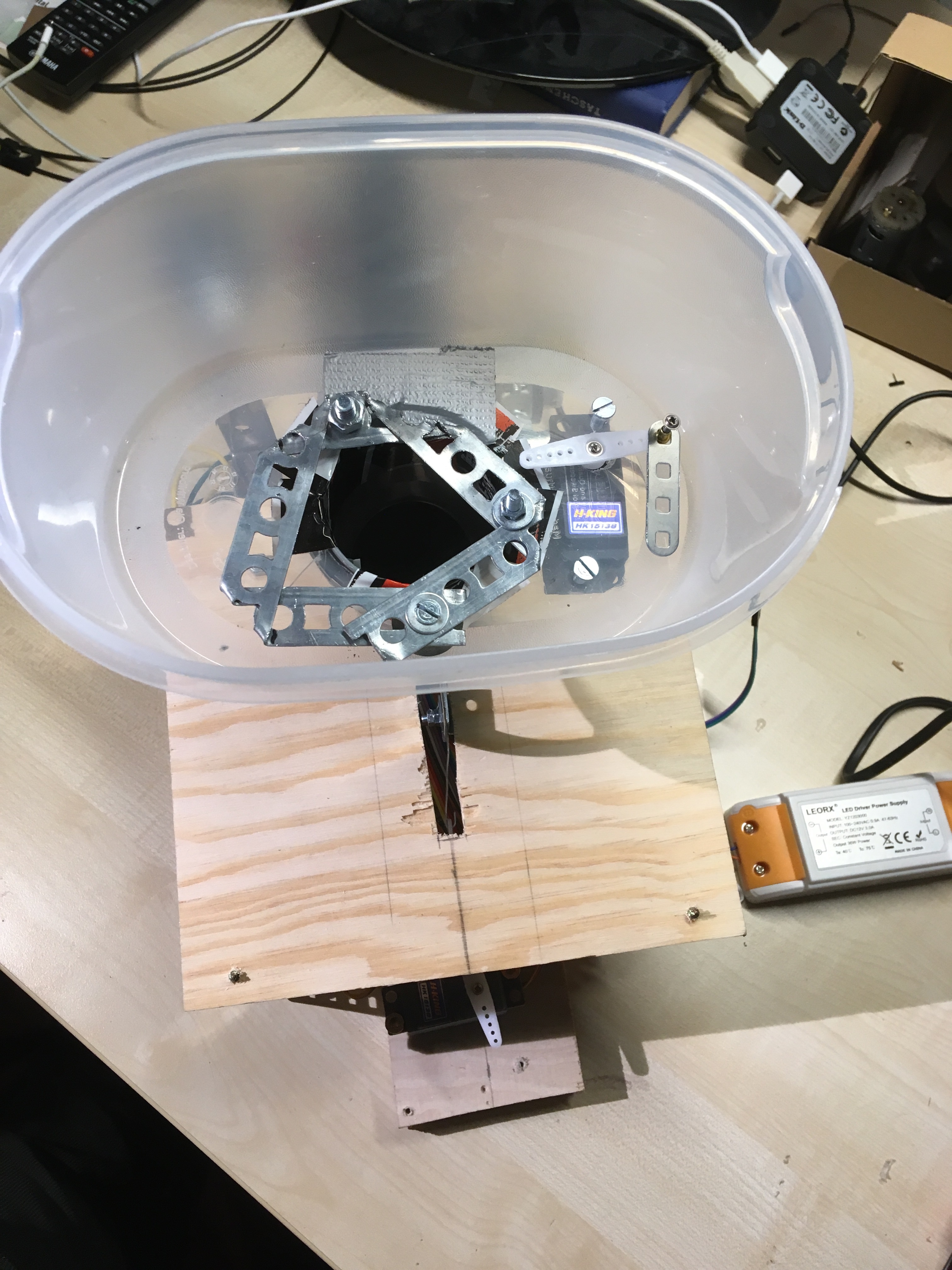
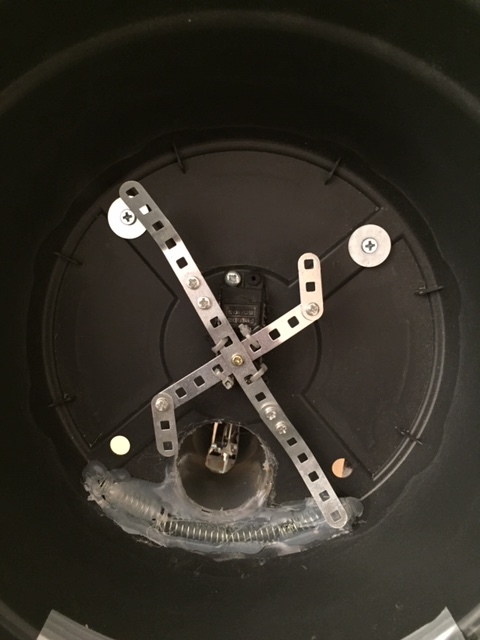
Can you also post a picture from the top of your machine, how the ball serving works? I tried something, but this did not work (not connected in the picture). I think the principle is ok, maybe my ballcontainer is too small:
1 Like
…that is an industrial secret 
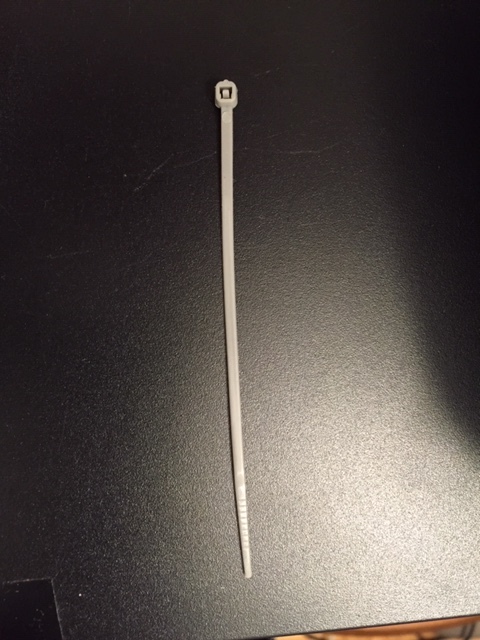
it is a small zip tie used to stop the balls otherwise in certain situations they could fall down when it is not wanted. It is only a low resistance, so there is no problem for the servo to push the balls forward when it is the time and the servo gives the timing, not the gravity.
I see you have almost completed  do not give up
do not give up 
1 Like
Furobot version 3.1 is ready for testing!
After the 1st and 2nd generation (see photos above) a new hardware feature has been introduced: 3 wheels (that means side spin for the  lovers)
lovers)

1 Like
…and here the first video:
Very interesting project. I just wondering what is the wheel and tires you use? They look very big in size. Any link to view the detail for the wheel? Appreciate and thanks.
If I was to guess those wheels are off a model airplane. Try a hobby shop my airplane wheels are 64mm.
Thanks for the input, I did a quick search in ebay for the airplane wheel, all of them are round shape as show below picture.

If not mistaken, from the video and photos, the shaft from DC motor are totally round shape and attach to 12mm hex coupler (adaptor) before attach the wheel.
In one of my projects I have used foam wheels with diameter 65mm, in the other 75mm
https://www.aliexpress.com/item/1pcs-lot-High-quality-Airplane-Wheels-diamete-30-35-40-45-50-55-60-65-70/32972669488.html
1 Like
I guess you need something like this, also slower motors would do the work
Thanks for the link and reply. With foam wheels, can the table tennis balls come shoot out with spin ball? I thought must be with rubber type of wheel only can generate spin ball.
Another questions is, how you screw/mount the wheel with your motor shaft?
I found below 2 types, which one you use?
For the power supply, you can try this adapter, minimum 2A, can get 4A or 5A because you can supply up to 2 or more motors.
Example as below:
I’m using the power supply of a notebook : 12V 5A
The spin with foam is enough for me, I did not try with rubber.
I have selected the following item with M4 on one side and 3 mm on the other side (there are also other options here).
Thanks.
Appreciate for your great sharing and reply.