Hi Blynkers,
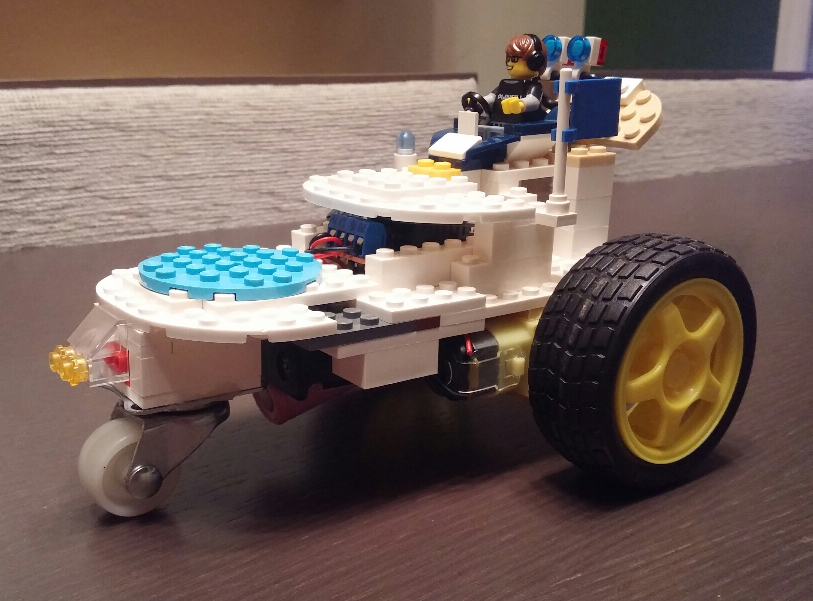
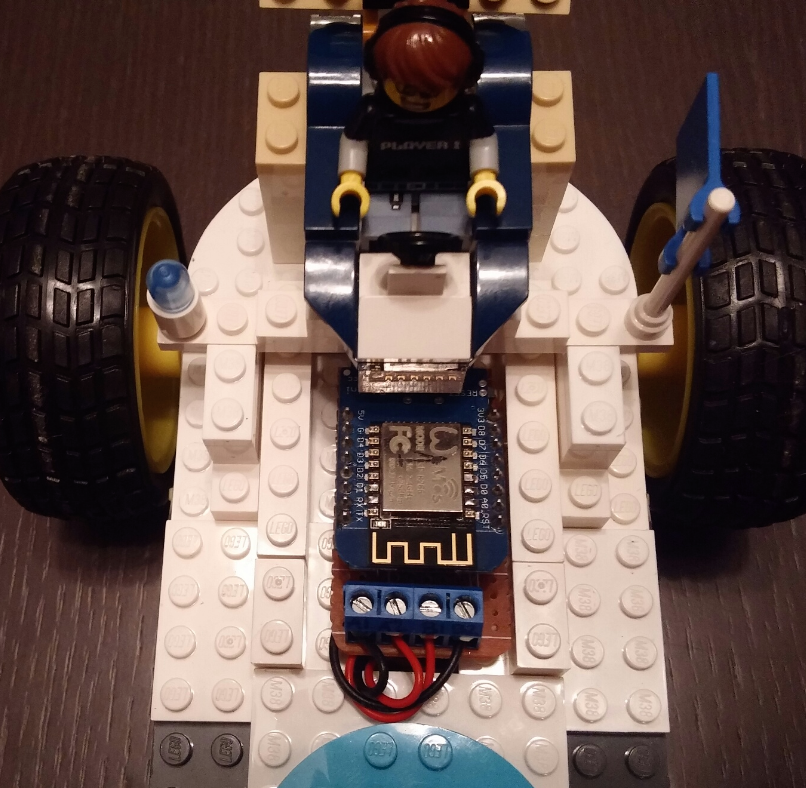
I’ve done a small Car with Legos and before let my daughter play with it, I just wanted to share the monster!
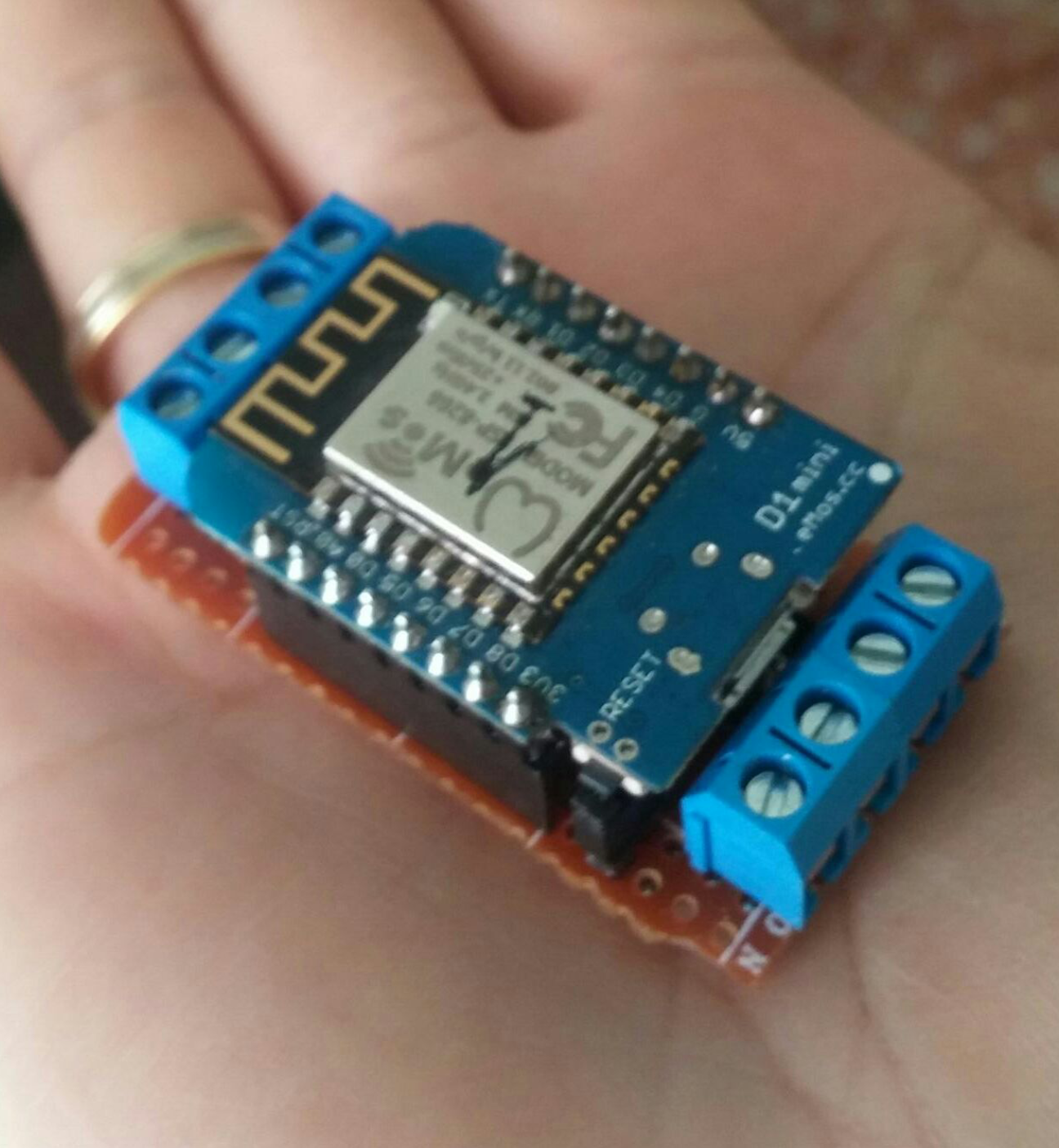
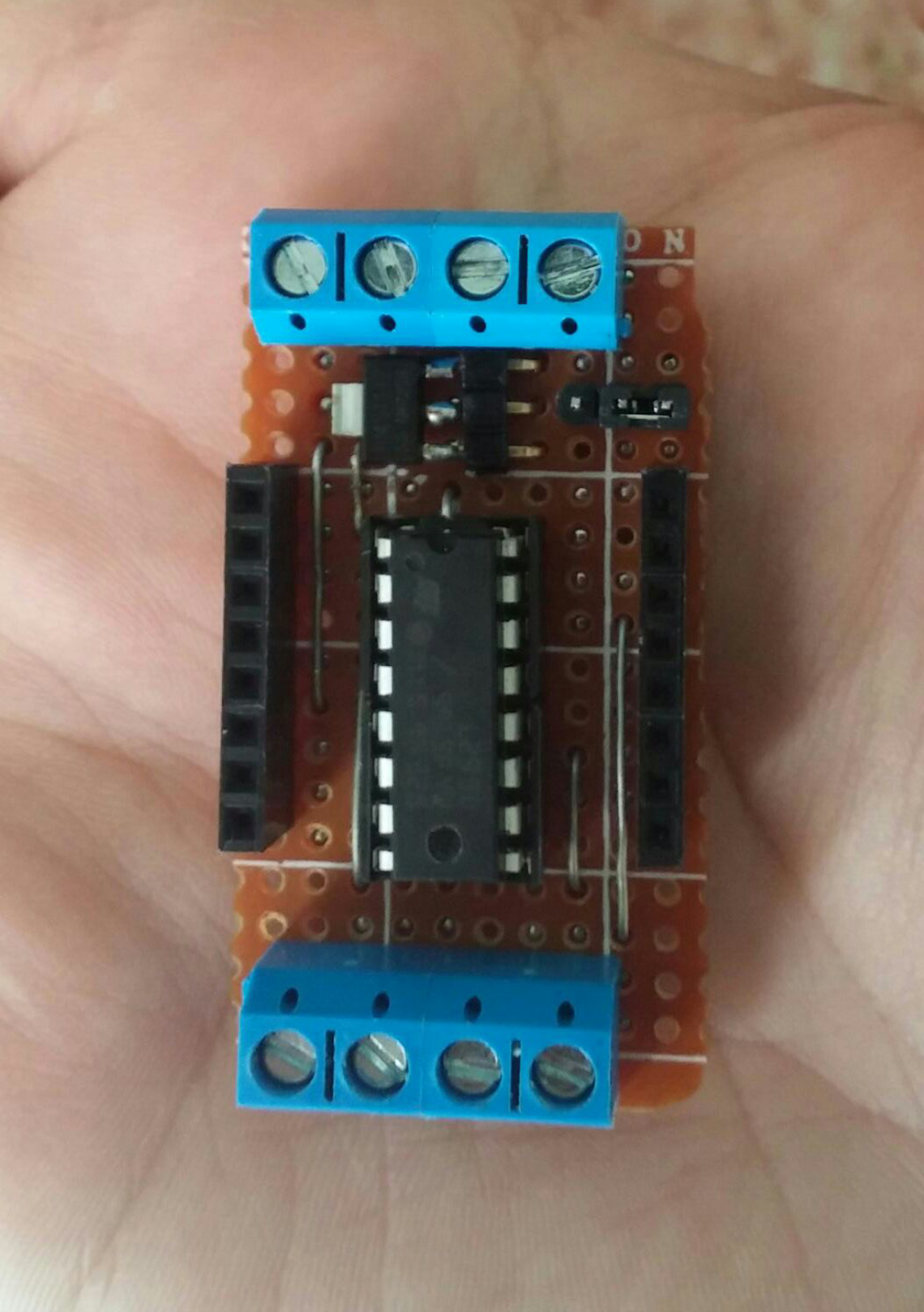
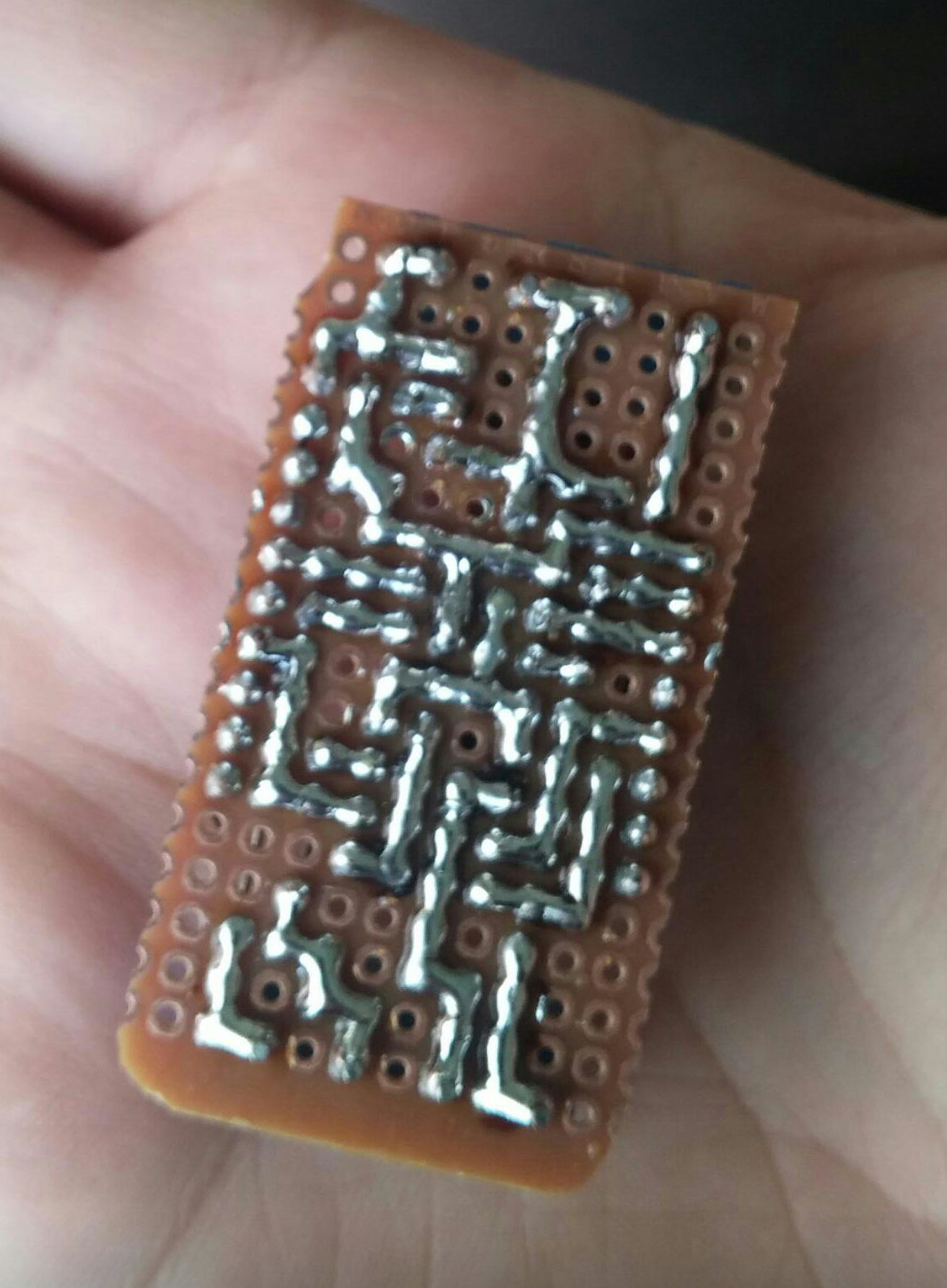
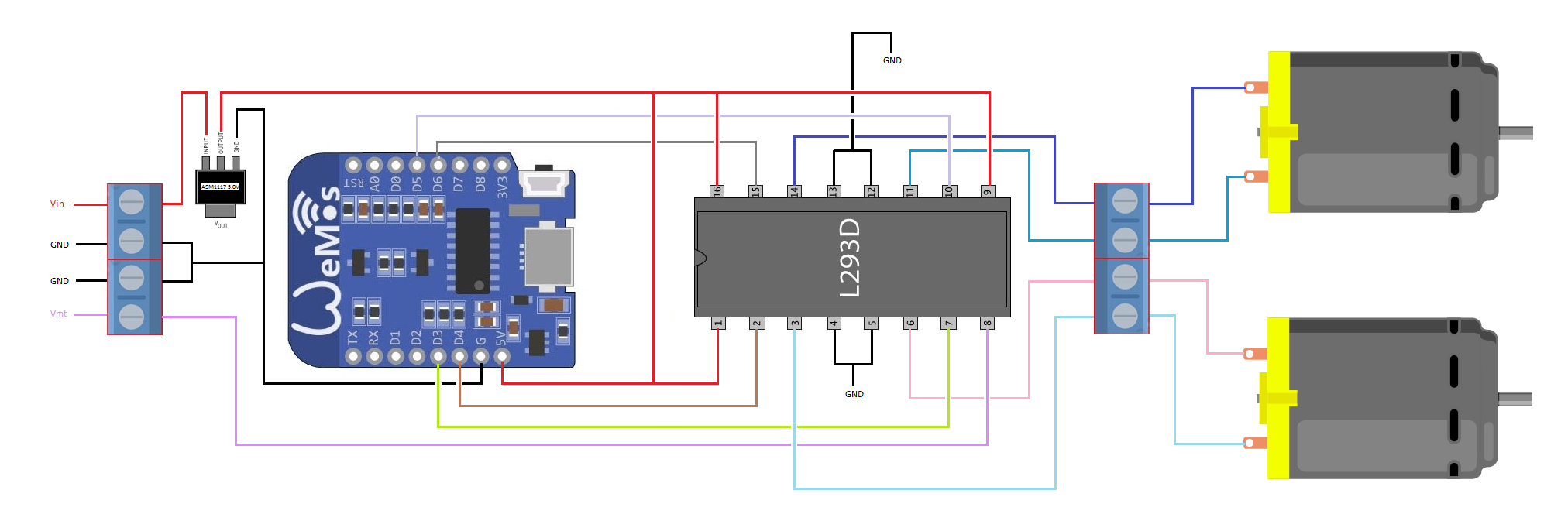
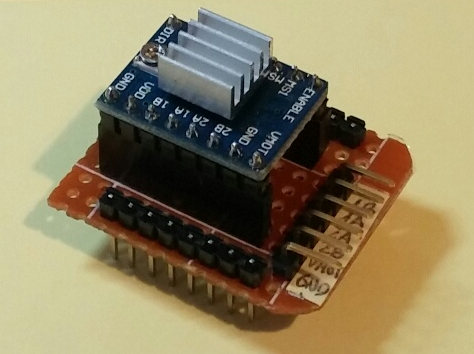
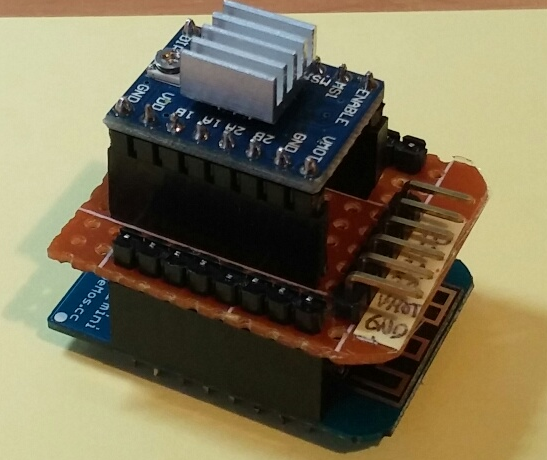
The motor shield is the L293D adapted to the Wemos size. I can share the details if needed.

You can find the code below, it has been prepared to be updated via OTA, based on the one I posted time ago for an Arduino Nano and the ESP-01 as shield (you can find the topic HERE), and improved using pieces of code obtained from @Costas (thanks for your support  ).
).
#define BLYNK_PRINT Serial // Comment this out to disable prints and save space
#include <ArduinoOTA.h> // for local OTA updates
#include <ESP8266WiFi.h>
#include <BlynkSimpleEsp8266.h>
#include <SimpleTimer.h> // Essential for almost all sketches
SimpleTimer timer;
//********************* COMPLETE WITH YOUR DETAILS *************
// Get Auth Token in the Blynk App.
char auth[] = "Blynk_is_great";
char cloudserver[16] = "blynk-cloud.com";
char localserver[16] = "xxx.xxx.xxx.xxx"; // IP details for the local server.
char ssid[] = "xxxxxxxx"; // Your WiFi credentials.
char pass[] = "xxxxxxxxxxxxxx"; // Password.
char OTAhost[] = "WiFi4OTA1"; // Optional.
//****************
int motorA ; // Left motor connected at D2 and D4 WeMos Mini D1
int motorB ; // Right motor connected at D5 and D7 WeMos Mini D1
int X=512;
int Y=512;
int factor=0; // Variable to reduce speed of the motorA or B and turn.
int maximo=0;
bool isFirstConnect = true;
void reconnectBlynk() { // reconnect to server if disconnected
if (!Blynk.connected()) {
if(Blynk.connect()) {
BLYNK_LOG("Reconnected");
} else {
BLYNK_LOG("Not reconnected");
}
}
}
BLYNK_CONNECTED() {
if (isFirstConnect) {
Blynk.syncAll();
Blynk.notify("LET'S GO MATE!!!!");
isFirstConnect = false;
}
}
void setup()
{
Serial.begin(115200);
Serial.println("\n Starting");
//Blynk.begin(auth, ssid, pass); // normal Blynk Cloud server connection
//Blynk.config(auth, cloudserver); // for Blynk's cloud server if WiFi already connected
Blynk.begin(auth, ssid, pass, localserver); // for a local server requiring WiFi connection
int mytimeout = millis() / 1000;
while (Blynk.connect(1000) == false) { // wait here until connected to the server
if((millis() / 1000) > mytimeout + 8){ // try to connect to the server for less than 9 seconds
break; // continue with the sketch regardless of connection to the server
}
}
ArduinoOTA.setHostname(OTAhost); // for local OTA updates
ArduinoOTA.begin(); // for local OTA updates
timer.setInterval(15000, reconnectBlynk); // check every 15 seconds if we are connected to the server
pinMode(D3, OUTPUT);
pinMode(D4, OUTPUT);
pinMode(D5, OUTPUT);
pinMode(D6, OUTPUT);
}
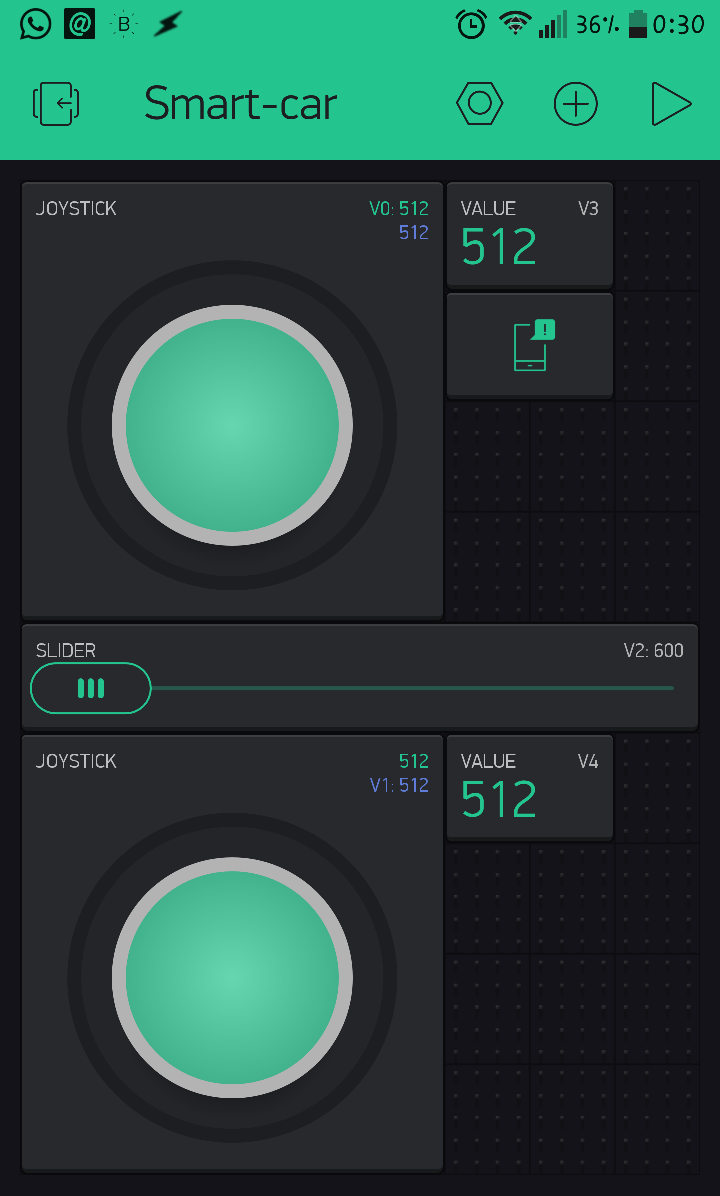
BLYNK_WRITE(V0)
{
int X1 = param.asInt();
X=X1;
Blynk.virtualWrite(V3, X);
}
BLYNK_WRITE(V1)
{
int Y1 = param.asInt();
Y=Y1;
Blynk.virtualWrite(V4, Y);
}
BLYNK_WRITE(V2)// slider from 600 to 1023!!!!
{
int vel = param.asInt();
maximo=vel;
}
void loop(){
if(X == 512 && Y == 512) // Both Motors stopped.
{
motorA = 0;
motorB = 0;
analogWrite(D3, motorA); //Entrada del L293D
analogWrite(D4, motorA); //Entrada del L293D
analogWrite(D5, motorB); //Entrada del L293D
analogWrite(D6, motorB); //Entrada del L293D
}
if(X >= 513 && Y == 512) // Both Motors Moving forward
{
motorA = X;
motorB = X;
motorA = map(motorA, 513,1023,400,maximo);
analogWrite(D3, motorA);
analogWrite(D4,0);
motorB = map(motorB, 513,1023,400,maximo);
analogWrite(D6, motorB);
analogWrite(D5,0);
}
if(X >= 513 && Y <= 511) //Turning Right Forward
{
motorA = X;
motorB = X;
factor = Y;
factor= map(factor,0,511,400,0);
motorA = map(motorA, 513,1023,400,maximo);
analogWrite(D3, motorA);
analogWrite(D4,0);
motorB = map(motorB, 513,1023,400,maximo);
analogWrite(D6, (motorB-factor));
analogWrite(D5,0);
}
if(X >= 513 && Y >= 513) //Turning Left Forward
{
motorA = X;
motorB = X;
factor = Y;
factor= map(factor,513,1013, 0,400);
motorA = map(motorA, 513,1023 , 400,maximo);
analogWrite(D3, (motorA-factor));
analogWrite(D4,0);
motorB = map(motorB, 513,1023 , 400,maximo);
analogWrite(D6, motorB);
analogWrite(D5,0);
}
if(X <= 511 && Y ==512) //Backwards
{
motorA = X;
motorB = X;
motorA = map(motorA, 0,511 , maximo,400);
analogWrite(D4, motorA);
analogWrite(D3,0);
motorB = map(motorB, 0,511 , maximo,400);
analogWrite(D5, motorB);
analogWrite(D6,0);
}
if(X <= 511 && Y <=511) //Turning Right Backwards
{
motorA = X;
motorB = X;
factor = Y;
factor= map(factor,0,511, 400,0);
motorA = map(motorA, 0,511 , maximo,400);
analogWrite(D4, motorA);
analogWrite(D3,0);
motorB = map(motorB, 0,511 , maximo,400);
analogWrite(D5, (motorB-factor));
analogWrite(D6,0);
}
if(X <= 511 && Y >=513) //Turning Left Backwards
{
motorA = X;
motorB = X;
factor = Y;
factor= map(factor,513,1023, 0,400);
motorA = map(motorA, 0,511 , maximo,400);
analogWrite(D4, (motorA-factor));
analogWrite(D3,0);
motorB = map(motorB, 0,511 , maximo,400);
analogWrite(D5, motorB);
analogWrite(D6,0);
}
if (Blynk.connected()) { // to ensure that Blynk.run() function is only called if we are still connected to the server
Blynk.run();
}
timer.run();
ArduinoOTA.handle(); // for local OTA updates
}
At the moment I have no video done but if it survives till tomorrow night I’ll post it.
EDIT:
The video is already here:
Kind regards!!!