Hi makers,
this is my first project with blynk…is a robt controlled by Blynk but i don’t use the motor scheld, i use the fantastic L293D.
In this project is very important to don’t use the pin used by Wifi sheld!
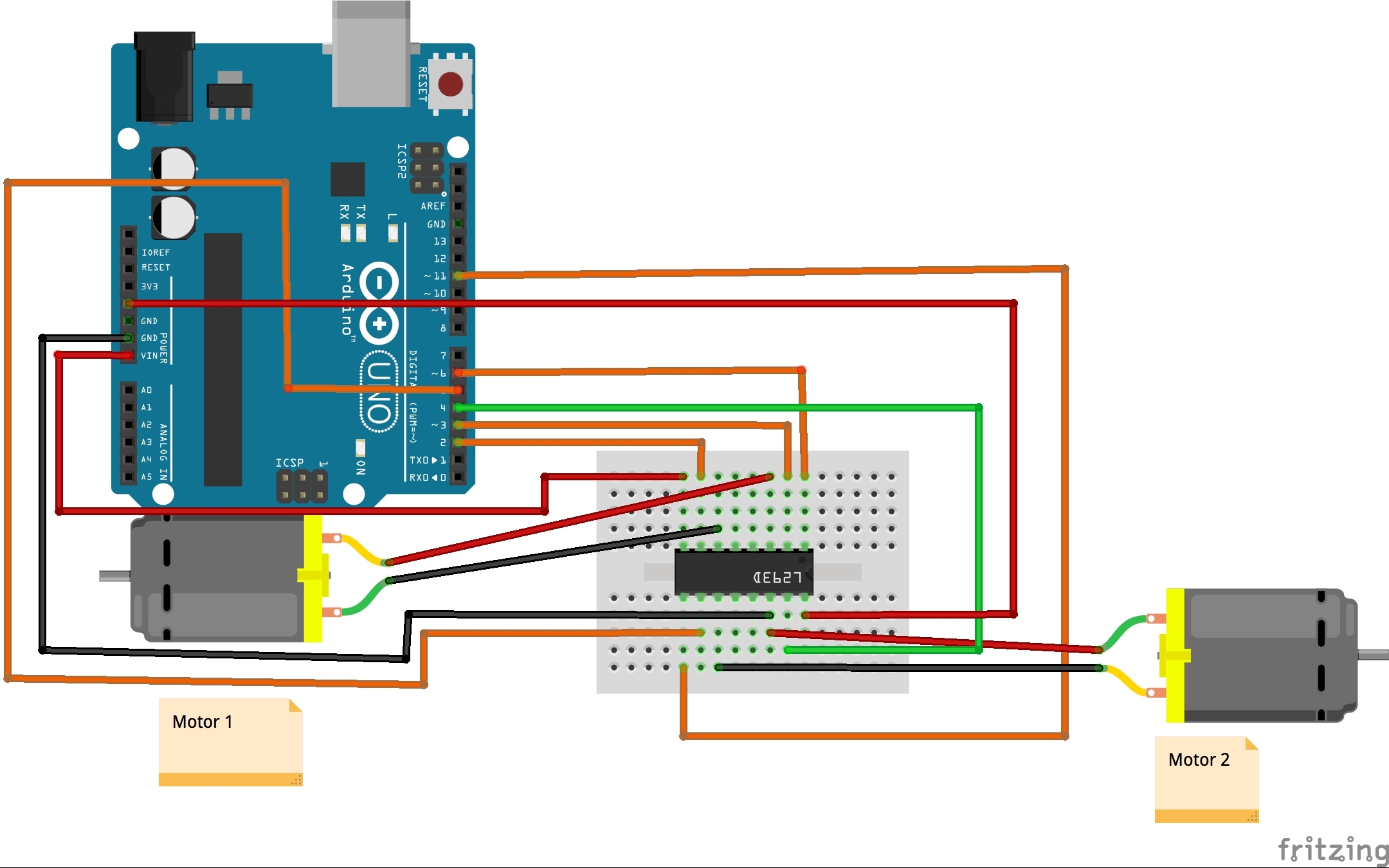
First the L293 connection and pin numbers
second the wiring
…the skech
/* Inspired by http://circuitdigest.com/microcontroller-projects/arduino-wifi-controlled-robot
with WIFI sheld AND the low cost L293D
isn't possible to use the motor sheld, because they use the same pins of WIFI sheld
*/
#define BLYNK_PRINT Serial
// Comment this out to disable prints and save space
#include SPI.h
#include WiFi.h
#include BlynkSimpleWifi.h
// You should get Auth Token in the Blynk App.
// Go to the Project Settings (nut icon).
char auth[] = "Your auth";
// Your WiFi credentials
char ssid[] = "Your SSD";
char pass[] = "Your pass; // Set to "" for open networks
//Motors wiring and arduino connection
/*
Pin L293 Pin Arduino
1 D6
2 D3
3 + Motor 1
4 not connect
5 not connect
6 - Motor 1
7 D2
8 Vin
9 D11
10 D5
11 - Motor 2
12 not connect
13 gnd
14 + Motor 2
15 D4
16 5V
*/
#define E1 6 // Enable Pin PWM for motor 1---->D6
#define E2 11 // Enable Pin PWM for motor 2---->D11
#define I1 2 // Control pin 1 for motor 1 ---->D2
#define I2 3 // Control pin 2 for motor 1 ---->D3
#define I3 4 // Control pin 1 for motor 2 ---->D4
#define I4 5 // Control pin 2 for motor 2 ---->D5
void setup(){
Serial.begin(9600);
Blynk.begin(auth, ssid, pass);
// Motors pins "E" is for "Engine"
pinMode(E1, OUTPUT); //pin D6 arduino
pinMode(E2, OUTPUT); //pin D11 arduino
//Motore 1
pinMode(I1, OUTPUT); //pin D2 arduino
pinMode(I2, OUTPUT); //pin D3 arduino
//Motore 2
pinMode(I3, OUTPUT); //pin D4 arduino
pinMode(I4, OUTPUT); //pin D5 arduino
}
BLYNK_WRITE(V1)
{
int x = param[0].asInt();
int y = param[1].asInt();
if(y>220)
avanti();
else if(y<35)
indietro();
else if(x>220)
destra();
else if(x<35)
sinistra();
else
ferma();
}
void loop()
{
Blynk.run();
}
//function, "avanti" is forward, "indietro" is back, "destra" is right, "sinistra" is left
void avanti(){
analogWrite(E1, 255);
analogWrite(E2, 255);
> digitalWrite(I1, HIGH);
> digitalWrite(I2, LOW);
> digitalWrite(I3, HIGH);
> digitalWrite(I4, LOW);
> }
> void indietro(){
> analogWrite(E1, 255);
> analogWrite(E2, 255);
> digitalWrite(I1, LOW);
> digitalWrite(I2, HIGH);
> digitalWrite(I3, LOW);
> digitalWrite(I4, HIGH);
> }
> void destra(){
> analogWrite(E1, 255);
> analogWrite(E2, 255);
> digitalWrite(I1, LOW);
> digitalWrite(I2, HIGH);
> digitalWrite(I3, HIGH);
> digitalWrite(I4, LOW);
> }
> void sinistra(){
> analogWrite(E1, 255);
> analogWrite(E2, 255);
> digitalWrite(I1, HIGH);
> digitalWrite(I2, LOW);
> digitalWrite(I3, LOW);
> digitalWrite(I4, HIGH);
> }
> void ferma(){
> analogWrite(E1, 0);
> analogWrite(E2, 0);
> digitalWrite(I1, LOW);
> digitalWrite(I2, LOW);
> digitalWrite(I3, LOW);
> digitalWrite(I4, LOW);
> }