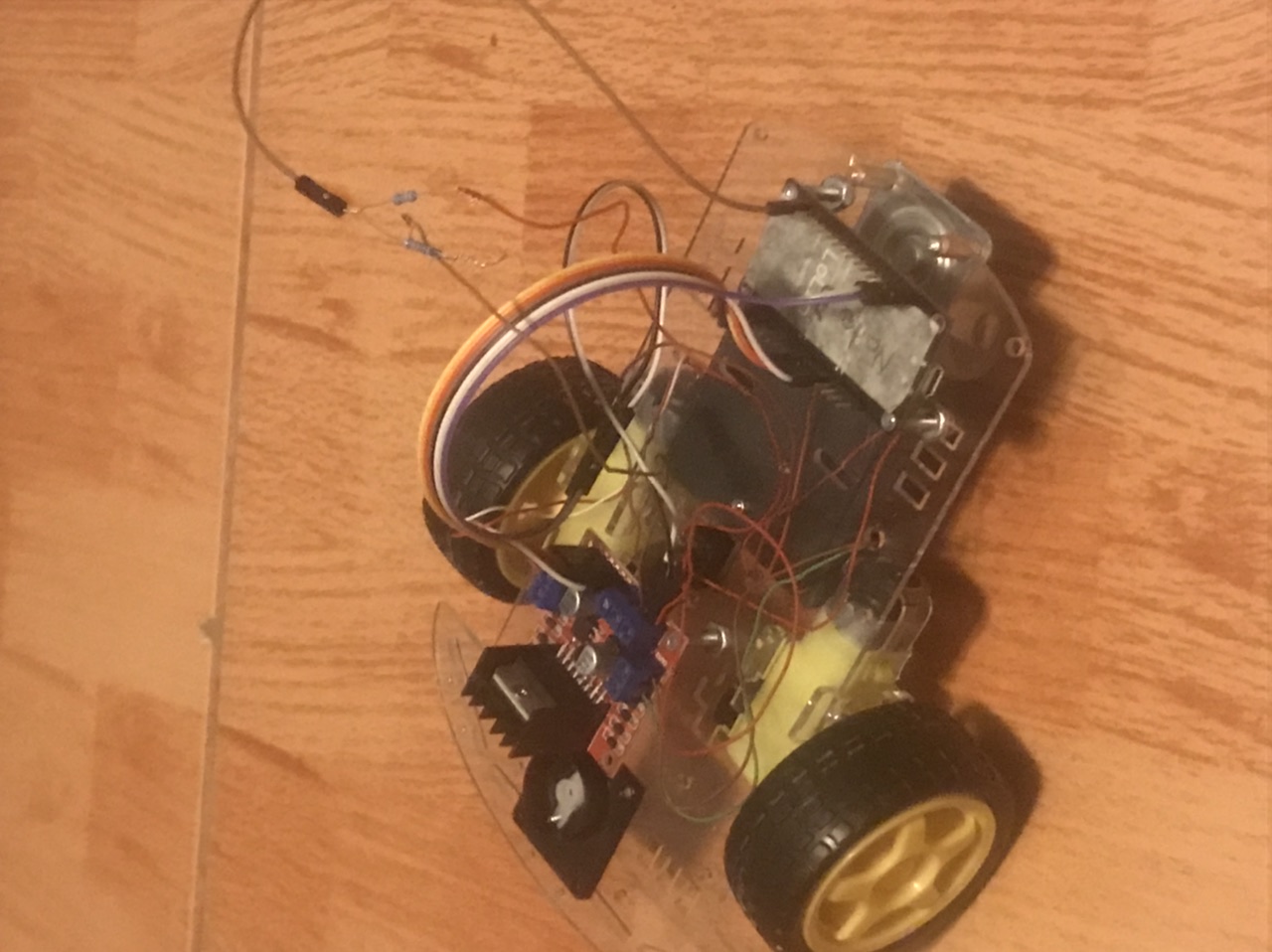
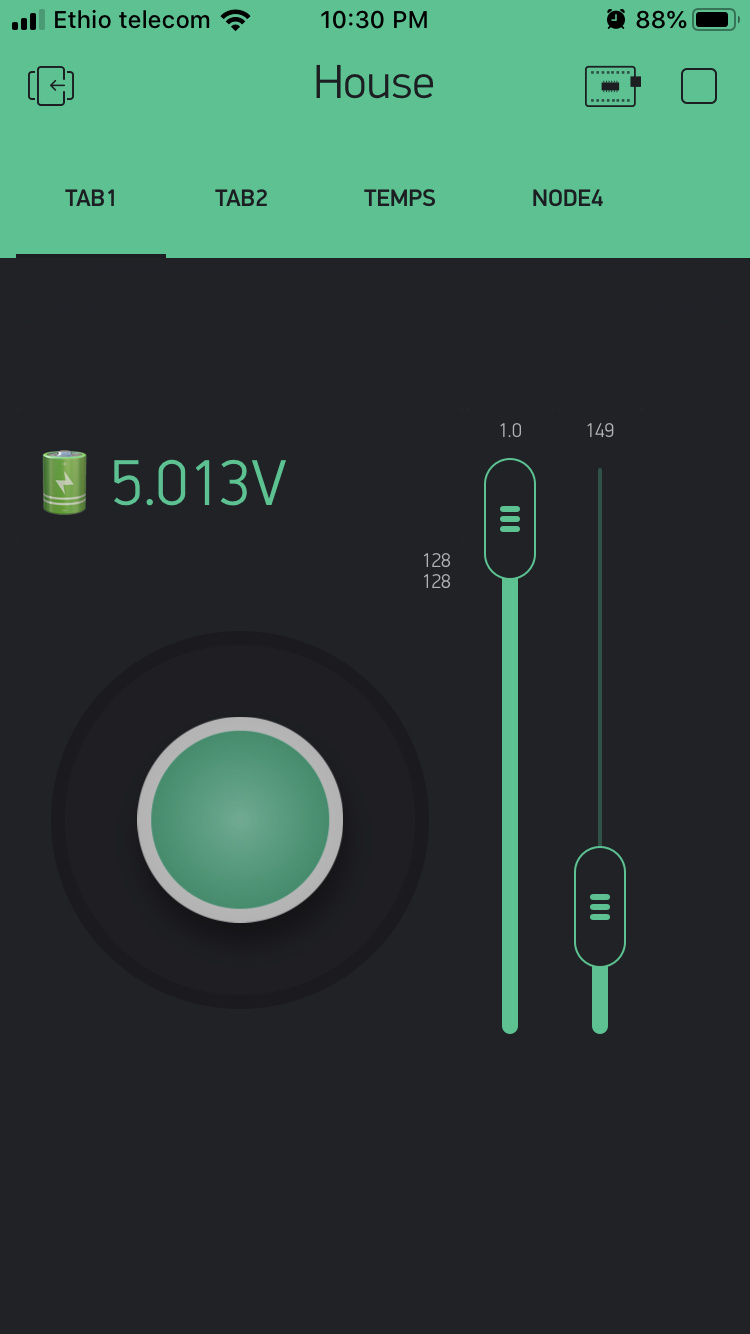
Alright, just made a 3 wheeled 2 wheel drive car. My searches didn’t bring up any satisfactory joystick code, so I headed in and tried my own. Maps the y axis so that it starts counting back up below center but leaves a buffer in the middle. Maps the x axis and subtracts that speed from the proper wheel. Some code and observations. I first got all the code running and virtual writing the wheel speeds to the app. I noticed that the app would get way behind with the numbers. I had decided before I started I would run this one on local server because our internet has bad latency. Once I got it running on local server it was better but it still was slow. When I commented out the virtual writes BAMB!! works fine. I would love to hear criticisms on the code.
Setup
-three wheeled car from Banggood or Ebay includes 4- AA battery pack and L298N motor driver (also included an Uno and shield)
-Instead of the Uno I am using the trusty NodeMcu
-virtual Joystick
Additions for future
-Battery voltage off the analog pin
-Ordered a IR bar to try line following
#include <ESP8266WiFi.h>
#include <BlynkSimpleEsp8266.h>
#include <ESP8266mDNS.h>
#include <WiFiUdp.h>
#include <ArduinoOTA.h>
// You should get Auth Token in the Blynk App.
// Go to the Project Settings (nut icon).
// Use your own WiFi settings
char auth[] = "==";
char ssid[] = "==";
char pass[] = "==";
bool reverseFlag = false;
bool drivingFlag = false;
bool leftTurnFlag = false;
bool rightTurnFlag = false;
#define RightSpeedPin D5
#define RightMotorDir D6
#define RightMotorDir1 D7
#define LeftSpeedPin D8
#define LeftMotorDir D1
#define LeftMotorDir1 D0
int leftMotorSpeed = 0;
int rightMotorSpeed = 0;
void setup()
{
// initial settings for motors off and direction forward
pinMode(RightMotorDir1, OUTPUT);
pinMode(RightMotorDir, OUTPUT);
pinMode(LeftMotorDir1, OUTPUT);
pinMode(LeftMotorDir, OUTPUT);
pinMode(RightSpeedPin, OUTPUT);
pinMode(LeftSpeedPin, OUTPUT);
digitalWrite(RightMotorDir1,LOW);
digitalWrite(RightMotorDir,LOW);
digitalWrite(LeftMotorDir1, LOW);
digitalWrite(LeftMotorDir,LOW);
Serial.begin(9600);
Blynk.begin(auth, ssid, pass, IPAddress(192,168,0,97), 8080);
Blynk.connect();
ArduinoOTA.setHostname("car");
ArduinoOTA.begin();
Serial.println("setup");
}
void loop()
{
Blynk.run();
ArduinoOTA.handle();
}
BLYNK_WRITE(V1)
{
int x = param[0].asInt();
int y = param[1].asInt();
int y1;
int factor;
//maps forward, stop and backward (speed)
if((y > 123)&&(y < 131))
{
drivingFlag = false;
//Blynk.virtualWrite(V6,"stop1");
Serial.println("stop");
}
else if(y < 129)
{
y1 = map(y,0,125,1030,500);
reverseFlag = true;
drivingFlag = true;
//Blynk.virtualWrite(V6,"reverse");
Serial.println("reverse");
}
else{
y1 = map(y,131,255,500,1030);
reverseFlag = false;
drivingFlag = true;
//Blynk.virtualWrite(V6,"forward");
Serial.println("forward");
}
//maps left and right speed
if(x < 110)
{
factor = map(x,0,110,400,20);
leftTurnFlag = false;
rightTurnFlag = true;
}
else if (x > 144){
factor = map(x,144,255,20,400);
leftTurnFlag = true;
rightTurnFlag = false;
}
else
{
factor = 128;
leftTurnFlag = false;
rightTurnFlag = false;
}
//driving functions
if (drivingFlag == true)
{
///////////reverse
if (reverseFlag == true)
{
////////reverse left turn
if (leftTurnFlag == true)
{
rightTurnFlag = false;
rightMotorSpeed = y1;
leftMotorSpeed = (y1 - factor);
if (leftMotorSpeed < 500){
leftMotorSpeed = 0;
}
driveBackward();
//Blynk.virtualWrite(V4, "ReverseLeft");
//Blynk.virtualWrite(V3, leftMotorSpeed);
//Blynk.virtualWrite(V2, rightMotorSpeed);
Serial.print("reverseleft");
}
else if (rightTurnFlag == true){
leftTurnFlag = false;
leftMotorSpeed = y1;
rightMotorSpeed = (y1 - factor);
if (rightMotorSpeed < 500){
rightMotorSpeed = 0;
}
driveBackward();
//Blynk.virtualWrite(V4, "ReverseRight");
//Blynk.virtualWrite(V3, leftMotorSpeed);
//Blynk.virtualWrite(V2, rightMotorSpeed);
Serial.print("reverseRight");
}
else
{
leftMotorSpeed = y1;
rightMotorSpeed = y1;
driveBackward();
//Blynk.virtualWrite(V4, "ReverseStraight");
//Blynk.virtualWrite(V3, leftMotorSpeed);
//Blynk.virtualWrite(V2, rightMotorSpeed);
}
}
//////////////////////////////forward
if (reverseFlag == false)
{
if (leftTurnFlag == true)
{
rightTurnFlag = false;
rightMotorSpeed = y1;
leftMotorSpeed = (y1 - factor);
driveForward();
//Blynk.virtualWrite(V4, "ForwarLeft");
//Blynk.virtualWrite(V3, leftMotorSpeed);
//Blynk.virtualWrite(V2, rightMotorSpeed);
}
else if (rightTurnFlag == true){
leftTurnFlag = false;
leftMotorSpeed = y1;
rightMotorSpeed = (y1 - factor);
driveForward();
//Blynk.virtualWrite(V4, "ForwardRight");
//Blynk.virtualWrite(V3, leftMotorSpeed);
//Blynk.virtualWrite(V2, rightMotorSpeed);
}
else
{
leftMotorSpeed = y1;
rightMotorSpeed = y1;
driveForward();
//Blynk.virtualWrite(V4, "ForwardStraight");
//Blynk.virtualWrite(V3, leftMotorSpeed);
//Blynk.virtualWrite(V2, rightMotorSpeed);
}
}
}
else
{
driveStop();
//Blynk.virtualWrite(V6, "stopped");
//Blynk.virtualWrite(V4, "Stopped");
leftMotorSpeed = 500;
rightMotorSpeed = 500;
//Blynk.virtualWrite(V3, leftMotorSpeed);
//Blynk.virtualWrite(V2, rightMotorSpeed);
}
}
void driveForward()
{
analogWrite(RightSpeedPin, rightMotorSpeed);
analogWrite(LeftSpeedPin, leftMotorSpeed);
digitalWrite(RightMotorDir, LOW);
digitalWrite(RightMotorDir1, HIGH);
digitalWrite(LeftMotorDir, LOW);
digitalWrite(LeftMotorDir1, HIGH);
Serial.print("now driving forward ");
Serial.print(rightMotorSpeed);
Serial.println(leftMotorSpeed);
}
void driveBackward()
{
analogWrite(RightSpeedPin, rightMotorSpeed);
analogWrite(LeftSpeedPin, leftMotorSpeed);
digitalWrite(RightMotorDir1,LOW);
digitalWrite(RightMotorDir,HIGH);
digitalWrite(LeftMotorDir1, LOW);
digitalWrite(LeftMotorDir,HIGH);
Serial.print("now driving backward");
Serial.print(rightMotorSpeed);
Serial.println(leftMotorSpeed);
}
void driveStop()
{
digitalWrite(RightMotorDir1,LOW);
digitalWrite(RightMotorDir,LOW);
digitalWrite(LeftMotorDir1, LOW);
digitalWrite(LeftMotorDir,LOW);
Serial.print("now stoppppped ");
Serial.print(rightMotorSpeed);
Serial.println(leftMotorSpeed);
}