The full code is this :sorriso:
int contato = 2;
int pirPin = 6;
#include <EEPROM.h> // We are going to read and write PICC's UIDs from/to EEPROM
#include <SPI.h> // RC522 Module uses SPI protocol
#include <MFRC522.h> // Library for Mifare RC522 Devices
#define BLYNK_PRINT Serial
#include <SPI.h>
#include <Ethernet.h>
#include <BlynkSimpleEthernet.h>
#include <SerialRelay.h>
SerialRelay relays(22, 23, 1); // (data, clock, número de módulos)
#define COMMON_ANODE
#ifdef COMMON_ANODE
#define LED_ON LOW
#define LED_OFF HIGH
#else
#define LED_ON HIGH
#define LED_OFF LOW
#endif
#define redLed 25 // Set Led Pins
#define greenLed 26
#define blueLed 24
#define relay 8 // Set Relay Pin
#define wipeB 3 // Button pin for WipeMode
#define W5100_CS 10
#define SDCARD_CS 4
bool programMode = false; // initialize programming mode to false
uint8_t successRead; // Variable integer to keep if we have Successful Read from Reader
byte storedCard[4]; // Stores an ID read from EEPROM
byte readCard[4]; // Stores scanned ID read from RFID Module
byte masterCard[4]; // Stores master card's ID read from EEPROM
// Create MFRC522 instance.
#define SS_PIN 53
#define RST_PIN 5
MFRC522 mfrc522(SS_PIN, RST_PIN);
char auth[] = "636c9d838c794296aabd177971425508";
BLYNK_WRITE(V0) {
int pinValue = param.asInt();
//Serial.println(pinValue);
if (pinValue == 1) {
relays.SetRelay(1, SERIAL_RELAY_ON, 1); // liga o relé 01
} else {
relays.SetRelay(1, SERIAL_RELAY_OFF, 1); // desliga o relé 01
}
}
BLYNK_WRITE(V1) {
int pinValue = param.asInt();
//Serial.println(pinValue);
if (pinValue == 1) {
relays.SetRelay(2, SERIAL_RELAY_ON, 1); // liga o relé 02
} else {
relays.SetRelay(2, SERIAL_RELAY_OFF, 1); // desliga o relé 02
}
}
BLYNK_WRITE(V2) {
int pinValue = param.asInt();
//Serial.println(pinValue);
if (pinValue == 1) {
relays.SetRelay(3, SERIAL_RELAY_ON, 1); // liga o relé 03
} else {
relays.SetRelay(3, SERIAL_RELAY_OFF, 1); // desliga o relé 03
}
}
///////////////////////////////////////// Setup ///////////////////////////////////
void setup() {
//Arduino Pin Configuration
Serial.begin(9600); // Initialize serial communications with PC
pinMode(SDCARD_CS, OUTPUT);
digitalWrite(SDCARD_CS, HIGH); // Deselect the SD card
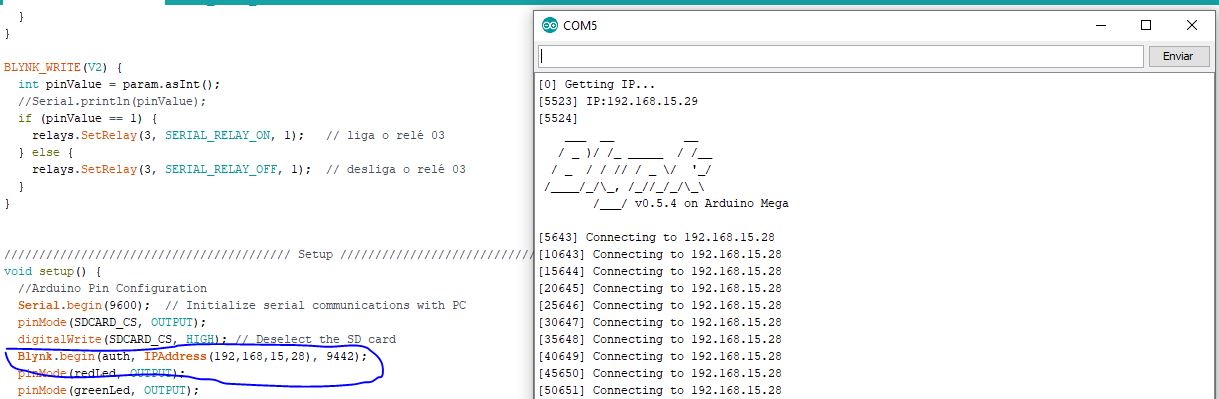
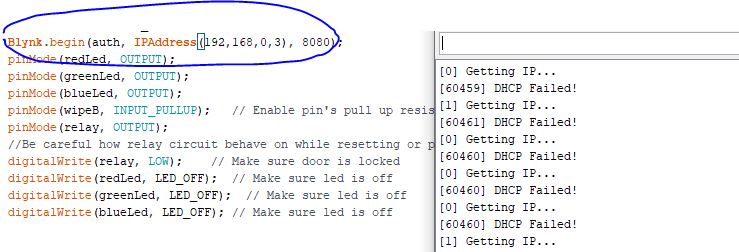
Blynk.begin(auth, IPAddress(192,168,0,3), 8080);
pinMode(redLed, OUTPUT);
pinMode(greenLed, OUTPUT);
pinMode(blueLed, OUTPUT);
pinMode(wipeB, INPUT_PULLUP); // Enable pin's pull up resistor
pinMode(relay, OUTPUT);
//Be careful how relay circuit behave on while resetting or power-cycling your Arduino
digitalWrite(relay, LOW); // Make sure door is locked
digitalWrite(redLed, LED_OFF); // Make sure led is off
digitalWrite(greenLed, LED_OFF); // Make sure led is off
digitalWrite(blueLed, LED_OFF); // Make sure led is off
pinMode(contato, INPUT); // Set pin as INPUT
pinMode(pirPin, INPUT);
//Protocol Configuration
Serial.begin(9600); // Initialize serial communications with PC
SPI.begin(); // MFRC522 Hardware uses SPI protocol
mfrc522.PCD_Init(); // Initialize MFRC522 Hardware
//If you set Antenna Gain to Max it will increase reading distance
//mfrc522.PCD_SetAntennaGain(mfrc522.RxGain_max);
Serial.println(F("Access Control Example v0.1")); // For debugging purposes
ShowReaderDetails(); // Show details of PCD - MFRC522 Card Reader details
//Wipe Code - If the Button (wipeB) Pressed while setup run (powered on) it wipes EEPROM
if (digitalRead(wipeB) == LOW) { // when button pressed pin should get low, button connected to ground
digitalWrite(redLed, LED_ON); // Red Led stays on to inform user we are going to wipe
Serial.println(F("Wipe Button Pressed"));
Serial.println(F("You have 10 seconds to Cancel"));
Serial.println(F("This will be remove all records and cannot be undone"));
bool buttonState = monitorWipeButton(10000); // Give user enough time to cancel operation
if (buttonState == true && digitalRead(wipeB) == LOW) { // If button still be pressed, wipe EEPROM
Serial.println(F("Starting Wiping EEPROM"));
for (uint16_t x = 0; x < EEPROM.length(); x = x + 1) { //Loop end of EEPROM address
if (EEPROM.read(x) == 0) { //If EEPROM address 0
// do nothing, already clear, go to the next address in order to save time and reduce writes to EEPROM
}
else {
EEPROM.write(x, 0); // if not write 0 to clear, it takes 3.3mS
}
}
Serial.println(F("EEPROM Successfully Wiped"));
digitalWrite(redLed, LED_OFF); // visualize a successful wipe
delay(200);
digitalWrite(redLed, LED_ON);
delay(200);
digitalWrite(redLed, LED_OFF);
delay(200);
digitalWrite(redLed, LED_ON);
delay(200);
digitalWrite(redLed, LED_OFF);
}
else {
Serial.println(F("Wiping Cancelled")); // Show some feedback that the wipe button did not pressed for 15 seconds
digitalWrite(redLed, LED_OFF);
}
}
// Check if master card defined, if not let user choose a master card
// This also useful to just redefine the Master Card
// You can keep other EEPROM records just write other than 143 to EEPROM address 1
// EEPROM address 1 should hold magical number which is '143'
if (EEPROM.read(1) != 143) {
Serial.println(F("No Master Card Defined"));
Serial.println(F("Scan A PICC to Define as Master Card"));
do {
successRead = getID(); // sets successRead to 1 when we get read from reader otherwise 0
digitalWrite(blueLed, LED_ON); // Visualize Master Card need to be defined
delay(200);
digitalWrite(blueLed, LED_OFF);
delay(200);
}
while (!successRead); // Program will not go further while you not get a successful read
for ( uint8_t j = 0; j < 4; j++ ) { // Loop 4 times
EEPROM.write( 2 + j, readCard[j] ); // Write scanned PICC's UID to EEPROM, start from address 3
}
EEPROM.write(1, 143); // Write to EEPROM we defined Master Card.
Serial.println(F("Master Card Defined"));
}
Serial.println(F("-------------------"));
Serial.println(F("Master Card's UID"));
for ( uint8_t i = 0; i < 4; i++ ) { // Read Master Card's UID from EEPROM
masterCard[i] = EEPROM.read(2 + i); // Write it to masterCard
Serial.print(masterCard[i], HEX);
}
Serial.println("");
Serial.println(F("-------------------"));
Serial.println(F("Everything is ready"));
Serial.println(F("Waiting PICCs to be scanned"));
cycleLeds(); // Everything ready lets give user some feedback by cycling leds
}
///////////////////////////////////////// Main Loop ///////////////////////////////////
void loop () {
do {
Blynk.run();
if (digitalRead(contato) == HIGH) {
Blynk.notify("Porta Aberta");
delay(1000);
}
int pirValue = digitalRead(pirPin);
if (pirValue == HIGH) {
Blynk.notify("Detected Someone");
delay(1000);
}
if (pirValue == LOW) {
delay(1000);
}
successRead = getID(); // sets successRead to 1 when we get read from reader otherwise 0
// When device is in use if wipe button pressed for 10 seconds initialize Master Card wiping
if (digitalRead(wipeB) == LOW) { // Check if button is pressed
// Visualize normal operation is iterrupted by pressing wipe button Red is like more Warning to user
digitalWrite(redLed, LED_ON); // Make sure led is off
digitalWrite(greenLed, LED_OFF); // Make sure led is off
digitalWrite(blueLed, LED_OFF); // Make sure led is off
// Give some feedback
Serial.println(F("Wipe Button Pressed"));
Serial.println(F("Master Card will be Erased! in 10 seconds"));
bool buttonState = monitorWipeButton(10000); // Give user enough time to cancel operation
if (buttonState == true && digitalRead(wipeB) == LOW) { // If button still be pressed, wipe EEPROM
EEPROM.write(1, 0); // Reset Magic Number.
Serial.println(F("Master Card Erased from device"));
Serial.println(F("Please reset to re-program Master Card"));
while (1);
}
Serial.println(F("Master Card Erase Cancelled"));
}
if (programMode) {
cycleLeds(); // Program Mode cycles through Red Green Blue waiting to read a new card
}
else {
normalModeOn(); // Normal mode, blue Power LED is on, all others are off
}
}
while (!successRead); //the program will not go further while you are not getting a successful read
if (programMode) {
if ( isMaster(readCard) ) { //When in program mode check First If master card scanned again to exit program mode
Serial.println(F("Master Card Scanned"));
Serial.println(F("Exiting Program Mode"));
Serial.println(F("-----------------------------"));
programMode = false;
return;
}
else {
if ( findID(readCard) ) { // If scanned card is known delete it
Serial.println(F("I know this PICC, removing..."));
deleteID(readCard);
Serial.println("-----------------------------");
Serial.println(F("Scan a PICC to ADD or REMOVE to EEPROM"));
}
else { // If scanned card is not known add it
Serial.println(F("I do not know this PICC, adding..."));
writeID(readCard);
Serial.println(F("-----------------------------"));
Serial.println(F("Scan a PICC to ADD or REMOVE to EEPROM"));
}
}
}
else {
if ( isMaster(readCard)) { // If scanned card's ID matches Master Card's ID - enter program mode
programMode = true;
Serial.println(F("Hello Master - Entered Program Mode"));
uint8_t count = EEPROM.read(0); // Read the first Byte of EEPROM that
Serial.print(F("I have ")); // stores the number of ID's in EEPROM
Serial.print(count);
Serial.print(F(" record(s) on EEPROM"));
Serial.println("");
Serial.println(F("Scan a PICC to ADD or REMOVE to EEPROM"));
Serial.println(F("Scan Master Card again to Exit Program Mode"));
Serial.println(F("-----------------------------"));
}
else {
if ( findID(readCard) ) { // If not, see if the card is in the EEPROM
Serial.println(F("Welcome, You shall pass"));
granted(300); // Open the door lock for 300 ms
}
else { // If not, show that the ID was not valid
Serial.println(F("You shall not pass"));
denied();
}
}
}
}
///////////////////////////////////////// Access Granted ///////////////////////////////////
void granted ( uint16_t setDelay) {
digitalWrite(blueLed, LED_OFF); // Turn off blue LED
digitalWrite(redLed, LED_OFF); // Turn off red LED
digitalWrite(greenLed, LED_ON); // Turn on green LED
relays.SetRelay(4, SERIAL_RELAY_ON, 1); // turn the relay ON
delay(1000); // wait for a second
relays.SetRelay(4, SERIAL_RELAY_OFF, 1); // turn the relay OFF
delay(1000);
//digitalWrite(relay, HIGH); // Unlock door!
//delay(1000);
//delay(setDelay); // Hold door lock open for given seconds
//digitalWrite(relay, LOW); // Relock door
//delay(3000); // Hold green LED on for a second
}
///////////////////////////////////////// Access Denied ///////////////////////////////////
void denied() {
digitalWrite(greenLed, LED_OFF); // Make sure green LED is off
digitalWrite(blueLed, LED_OFF); // Make sure blue LED is off
digitalWrite(redLed, LED_ON); // Turn on red LED
delay(1000);
}
///////////////////////////////////////// Get PICC's UID ///////////////////////////////////
uint8_t getID() {
// Getting ready for Reading PICCs
if ( ! mfrc522.PICC_IsNewCardPresent()) { //If a new PICC placed to RFID reader continue
return 0;
}
if ( ! mfrc522.PICC_ReadCardSerial()) { //Since a PICC placed get Serial and continue
return 0;
}
// There are Mifare PICCs which have 4 byte or 7 byte UID care if you use 7 byte PICC
// I think we should assume every PICC as they have 4 byte UID
// Until we support 7 byte PICCs
Serial.println(F("Scanned PICC's UID:"));
for ( uint8_t i = 0; i < 4; i++) { //
readCard[i] = mfrc522.uid.uidByte[i];
Serial.print(readCard[i], HEX);
}
Serial.println("");
mfrc522.PICC_HaltA(); // Stop reading
return 1;
}
void ShowReaderDetails() {
// Get the MFRC522 software version
byte v = mfrc522.PCD_ReadRegister(mfrc522.VersionReg);
Serial.print(F("MFRC522 Software Version: 0x"));
Serial.print(v, HEX);
if (v == 0x91)
Serial.print(F(" = v1.0"));
else if (v == 0x92)
Serial.print(F(" = v2.0"));
else
Serial.print(F(" (unknown),probably a chinese clone?"));
Serial.println("");
// When 0x00 or 0xFF is returned, communication probably failed
if ((v == 0x00) || (v == 0xFF)) {
Serial.println(F("WARNING: Communication failure, is the MFRC522 properly connected?"));
Serial.println(F("SYSTEM HALTED: Check connections."));
// Visualize system is halted
digitalWrite(greenLed, LED_OFF); // Make sure green LED is off
digitalWrite(blueLed, LED_OFF); // Make sure blue LED is off
digitalWrite(redLed, LED_ON); // Turn on red LED
while (true); // do not go further
}
}
///////////////////////////////////////// Cycle Leds (Program Mode) ///////////////////////////////////
void cycleLeds() {
digitalWrite(redLed, LED_OFF); // Make sure red LED is off
digitalWrite(greenLed, LED_ON); // Make sure green LED is on
digitalWrite(blueLed, LED_OFF); // Make sure blue LED is off
delay(200);
digitalWrite(redLed, LED_OFF); // Make sure red LED is off
digitalWrite(greenLed, LED_OFF); // Make sure green LED is off
digitalWrite(blueLed, LED_ON); // Make sure blue LED is on
delay(200);
digitalWrite(redLed, LED_ON); // Make sure red LED is on
digitalWrite(greenLed, LED_OFF); // Make sure green LED is off
digitalWrite(blueLed, LED_OFF); // Make sure blue LED is off
delay(200);
}
//////////////////////////////////////// Normal Mode Led ///////////////////////////////////
void normalModeOn () {
digitalWrite(blueLed, LED_ON); // Blue LED ON and ready to read card
digitalWrite(redLed, LED_OFF); // Make sure Red LED is off
digitalWrite(greenLed, LED_OFF); // Make sure Green LED is off
digitalWrite(relay, HIGH); // Make sure Door is Locked
}
//////////////////////////////////////// Read an ID from EEPROM //////////////////////////////
void readID( uint8_t number ) {
uint8_t start = (number * 4 ) + 2; // Figure out starting position
for ( uint8_t i = 0; i < 4; i++ ) { // Loop 4 times to get the 4 Bytes
storedCard[i] = EEPROM.read(start + i); // Assign values read from EEPROM to array
}
}
///////////////////////////////////////// Add ID to EEPROM ///////////////////////////////////
void writeID( byte a[] ) {
if ( !findID( a ) ) { // Before we write to the EEPROM, check to see if we have seen this card before!
uint8_t num = EEPROM.read(0); // Get the numer of used spaces, position 0 stores the number of ID cards
uint8_t start = ( num * 4 ) + 6; // Figure out where the next slot starts
num++; // Increment the counter by one
EEPROM.write( 0, num ); // Write the new count to the counter
for ( uint8_t j = 0; j < 4; j++ ) { // Loop 4 times
EEPROM.write( start + j, a[j] ); // Write the array values to EEPROM in the right position
}
successWrite();
Serial.println(F("Succesfully added ID record to EEPROM"));
}
else {
failedWrite();
Serial.println(F("Failed! There is something wrong with ID or bad EEPROM"));
}
}
///////////////////////////////////////// Remove ID from EEPROM ///////////////////////////////////
void deleteID( byte a[] ) {
if ( !findID( a ) ) { // Before we delete from the EEPROM, check to see if we have this card!
failedWrite(); // If not
Serial.println(F("Failed! There is something wrong with ID or bad EEPROM"));
}
else {
uint8_t num = EEPROM.read(0); // Get the numer of used spaces, position 0 stores the number of ID cards
uint8_t slot; // Figure out the slot number of the card
uint8_t start; // = ( num * 4 ) + 6; // Figure out where the next slot starts
uint8_t looping; // The number of times the loop repeats
uint8_t j;
uint8_t count = EEPROM.read(0); // Read the first Byte of EEPROM that stores number of cards
slot = findIDSLOT( a ); // Figure out the slot number of the card to delete
start = (slot * 4) + 2;
looping = ((num - slot) * 4);
num--; // Decrement the counter by one
EEPROM.write( 0, num ); // Write the new count to the counter
for ( j = 0; j < looping; j++ ) { // Loop the card shift times
EEPROM.write( start + j, EEPROM.read(start + 4 + j)); // Shift the array values to 4 places earlier in the EEPROM
}
for ( uint8_t k = 0; k < 4; k++ ) { // Shifting loop
EEPROM.write( start + j + k, 0);
}
successDelete();
Serial.println(F("Succesfully removed ID record from EEPROM"));
}
}
///////////////////////////////////////// Check Bytes ///////////////////////////////////
bool checkTwo ( byte a[], byte b[] ) {
for ( uint8_t k = 0; k < 4; k++ ) { // Loop 4 times
if ( a[k] != b[k] ) { // IF a != b then false, because: one fails, all fail
return false;
}
}
return true;
}
///////////////////////////////////////// Find Slot ///////////////////////////////////
uint8_t findIDSLOT( byte find[] ) {
uint8_t count = EEPROM.read(0); // Read the first Byte of EEPROM that
for ( uint8_t i = 1; i <= count; i++ ) { // Loop once for each EEPROM entry
readID(i); // Read an ID from EEPROM, it is stored in storedCard[4]
if ( checkTwo( find, storedCard ) ) { // Check to see if the storedCard read from EEPROM
// is the same as the find[] ID card passed
return i; // The slot number of the card
}
}
}
///////////////////////////////////////// Find ID From EEPROM ///////////////////////////////////
bool findID( byte find[] ) {
uint8_t count = EEPROM.read(0); // Read the first Byte of EEPROM that
for ( uint8_t i = 1; i < count; i++ ) { // Loop once for each EEPROM entry
readID(i); // Read an ID from EEPROM, it is stored in storedCard[4]
if ( checkTwo( find, storedCard ) ) { // Check to see if the storedCard read from EEPROM
return true;
}
else { // If not, return false
}
}
return false;
}
///////////////////////////////////////// Write Success to EEPROM ///////////////////////////////////
// Flashes the green LED 3 times to indicate a successful write to EEPROM
void successWrite() {
digitalWrite(blueLed, LED_OFF); // Make sure blue LED is off
digitalWrite(redLed, LED_OFF); // Make sure red LED is off
digitalWrite(greenLed, LED_OFF); // Make sure green LED is on
delay(200);
digitalWrite(greenLed, LED_ON); // Make sure green LED is on
delay(200);
digitalWrite(greenLed, LED_OFF); // Make sure green LED is off
delay(200);
digitalWrite(greenLed, LED_ON); // Make sure green LED is on
delay(200);
digitalWrite(greenLed, LED_OFF); // Make sure green LED is off
delay(200);
digitalWrite(greenLed, LED_ON); // Make sure green LED is on
delay(200);
}
///////////////////////////////////////// Write Failed to EEPROM ///////////////////////////////////
// Flashes the red LED 3 times to indicate a failed write to EEPROM
void failedWrite() {
digitalWrite(blueLed, LED_OFF); // Make sure blue LED is off
digitalWrite(redLed, LED_OFF); // Make sure red LED is off
digitalWrite(greenLed, LED_OFF); // Make sure green LED is off
delay(200);
digitalWrite(redLed, LED_ON); // Make sure red LED is on
delay(200);
digitalWrite(redLed, LED_OFF); // Make sure red LED is off
delay(200);
digitalWrite(redLed, LED_ON); // Make sure red LED is on
delay(200);
digitalWrite(redLed, LED_OFF); // Make sure red LED is off
delay(200);
digitalWrite(redLed, LED_ON); // Make sure red LED is on
delay(200);
}
///////////////////////////////////////// Success Remove UID From EEPROM ///////////////////////////////////
// Flashes the blue LED 3 times to indicate a success delete to EEPROM
void successDelete() {
digitalWrite(blueLed, LED_OFF); // Make sure blue LED is off
digitalWrite(redLed, LED_OFF); // Make sure red LED is off
digitalWrite(greenLed, LED_OFF); // Make sure green LED is off
delay(200);
digitalWrite(blueLed, LED_ON); // Make sure blue LED is on
delay(200);
digitalWrite(blueLed, LED_OFF); // Make sure blue LED is off
delay(200);
digitalWrite(blueLed, LED_ON); // Make sure blue LED is on
delay(200);
digitalWrite(blueLed, LED_OFF); // Make sure blue LED is off
delay(200);
digitalWrite(blueLed, LED_ON); // Make sure blue LED is on
delay(200);
}
////////////////////// Check readCard IF is masterCard ///////////////////////////////////
// Check to see if the ID passed is the master programing card
bool isMaster( byte test[] ) {
return checkTwo(test, masterCard);
}
bool monitorWipeButton(uint32_t interval) {
uint32_t now = (uint32_t)millis();
while ((uint32_t)millis() - now < interval) {
// check on every half a second
if (((uint32_t)millis() % 500) == 0) {
if (digitalRead(wipeB) != LOW)
return false;
}
}
return true;
}

 … you need to read this about your overloaded
… you need to read this about your overloaded 