@Toro_Blanco Google is king. 
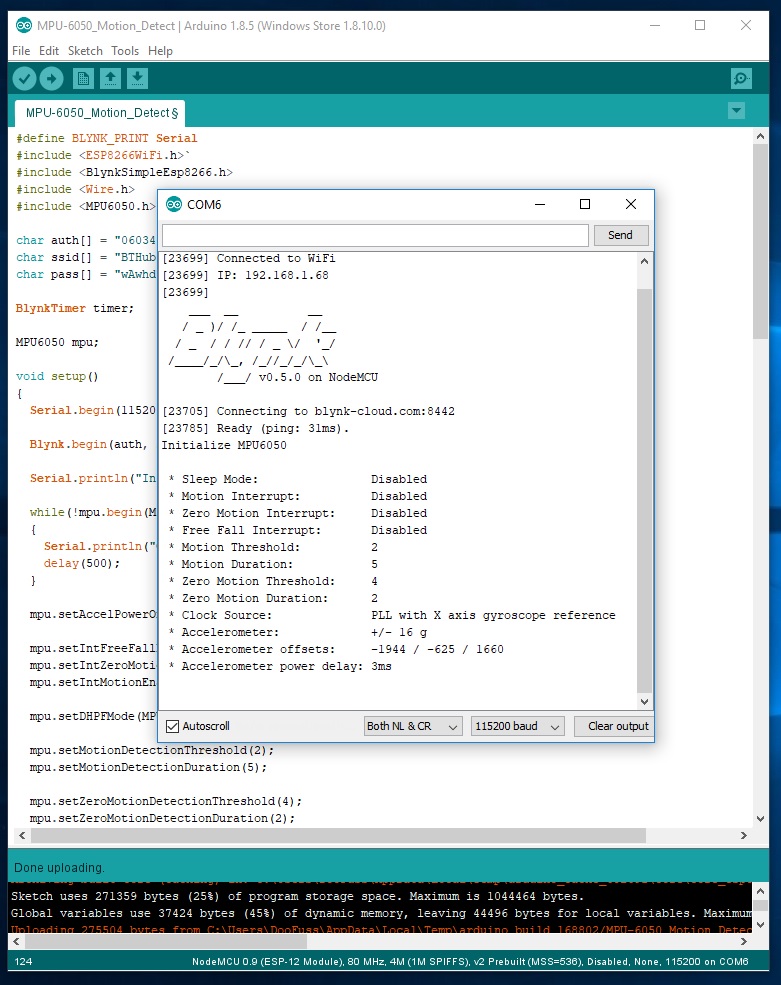
While waiting for it to compile and upload I found this.
mpu.setMotionDetectionThreshold
Get motion detection event acceleration threshold. This register configures the detection threshold for Motion interrupt generation. The unit of MOT_THR is 1LSB = 2mg. Motion is detected when the absolute value of any of the accelerometer measurements exceeds this Motion detection threshold. This condition increments the Motion detection duration counter. The Motion detection interrupt is triggered when the Motion Detection counter reaches the time count specified in MOT_DUR.
Returns:
Current motion detection acceleration threshold value (LSB = 2mg)
mpu.setMotionDetectionDuration
Get motion detection event duration threshold. This register configures the duration counter threshold for Motion interrupt generation. The duration counter ticks at 1 kHz, therefore MOT_DUR has a unit of 1LSB = 1ms. The Motion detection duration counter increments when the absolute value of any of the accelerometer measurements exceeds the Motion detection threshold. The Motion detection interrupt is triggered when the Motion detection counter reaches the time count specified in this register.
Returns:
Current motion detection duration threshold value (LSB = 1ms)
mpu.setZeroMotionDetectionThreshold
Get zero motion detection event acceleration threshold. This register configures the detection threshold for Zero Motion interrupt generation. The unit of ZRMOT_THR is 1LSB = 2mg. Zero Motion is detected when the absolute value of the accelerometer measurements for the 3 axes are each less than the detection threshold. This condition increments the Zero Motion duration counter. The Zero Motion interrupt is triggered when the Zero Motion duration counter reaches the time count specified in ZRMOT_DUR.
Unlike Free Fall or Motion detection, Zero Motion detection triggers an interrupt both when Zero Motion is first detected and when Zero Motion is no longer detected.
When a zero motion event is detected, a Zero Motion Status will be indicated in the MOT_DETECT_STATUS register. When a motion-to-zero-motion condition is detected, the status bit is set to 1. When a zero-motion-to- motion condition is detected, the status bit is set to 0.
Returns:
Current zero motion detection acceleration threshold value (LSB = 2mg)
mpu.setZeroMotionDetectionDuration
Get zero motion detection event duration threshold. This register configures the duration counter threshold for Zero Motion interrupt generation. The duration counter ticks at 16 Hz, therefore ZRMOT_DUR has a unit of 1 LSB = 64 ms. The Zero Motion duration counter increments while the absolute value of the accelerometer measurements are each less than the detection threshold. The Zero Motion interrupt is triggered when the Zero Motion duration counter reaches the time count specified in this register.
Returns:
Current zero motion detection duration threshold value (LSB = 64ms)
https://www.i2cdevlib.com/docs/html/class_m_p_u6050.html

 )
)