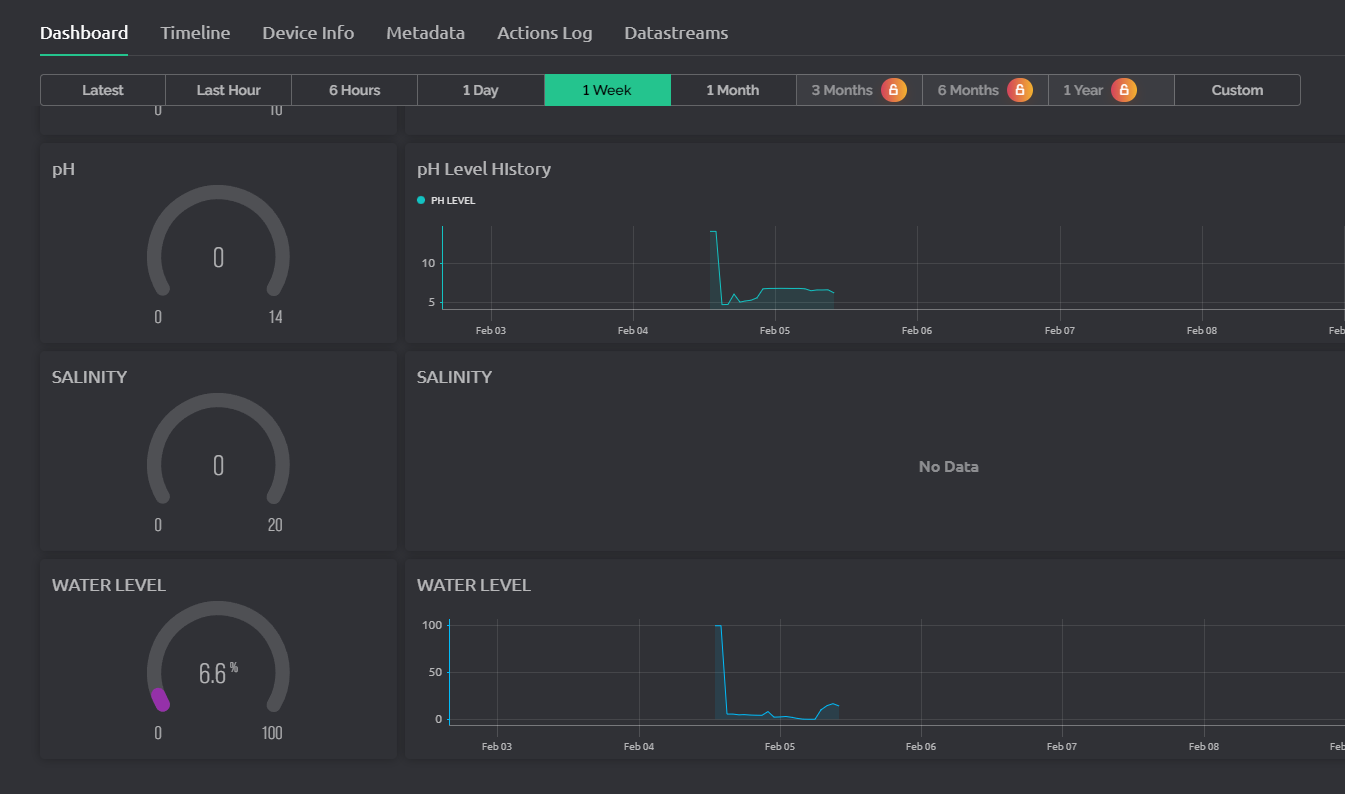
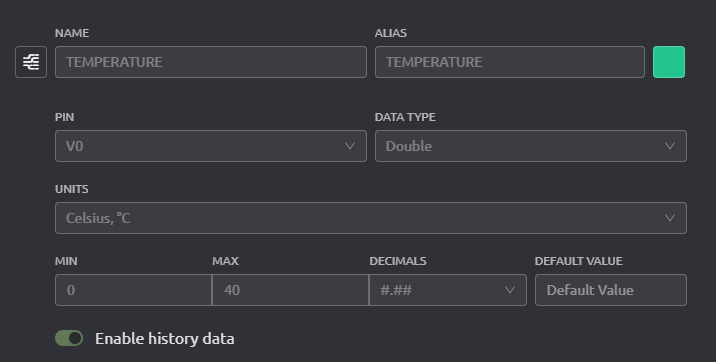
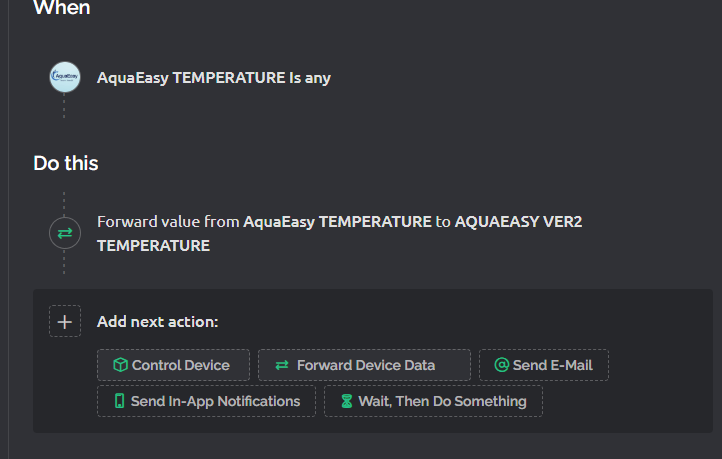
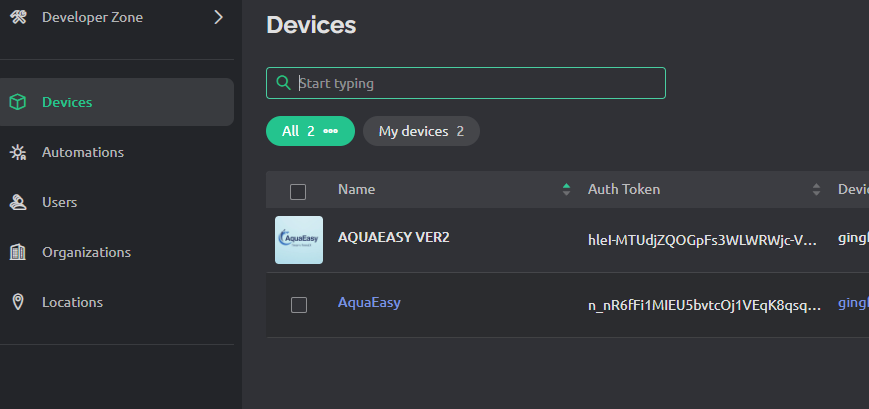
I have two esp32s running on the same template but has different device tokens. It was working well but the only issue was I can’t seem to access the other device’s sensor value history but the other one’s that are connected on the main esp board is working just fine. Example is that if I turn chart history into an hour ago history. It does not display the value, but if live reading it works fine. I used forward device data to sync the two esp boards. But I need to work the both out in a single device web dashboard in blynk that sync.
by the way this is the code, I haven’t tested the resending data through BLYNK_WRITE() and storing the data to another datastream but I hope this works.
/// JUST TEST THIS FIX FOR NOW
// for blynk ESP2 , FEB 09, 2024 3:51
#define BLYNK_TEMPLATE_ID "TMPL6-kTjpHlS"
#define BLYNK_TEMPLATE_NAME "AquaEasy Monitoring"
#define BLYNK_AUTH_TOKEN "hleI-MTUdjZQOGpFs3WLWRWjc-V1u8QI"
#define BLYNK_PRINT Serial
//install libraries
#include <WiFi.h>
#include <WiFiClient.h>
#include <BlynkSimpleEsp32.h>
#include <Wire.h>
//#include <Adafruit_Sensor.h>
//#include <Adafruit_BME280.h>
#include <ESP32Servo.h> // Library for Servo motor
#include <Wire.h>
char auth[] = BLYNK_AUTH_TOKEN;
char ssid[] = "TP-Link_Extender"; // type your wifi name
char pass[] = ""; // type your wifi password
BlynkTimer timer; //import blynk timer function
int timedelay = 500;
#include <DFRobot_ESP_PH_WITH_ADC.h>
#define PH_PIN 34 // Analog pin for pH sensor
#define trigPin 25 //Set to GPIO 32
#define echoPin 26 //set to GPIO 33
#define servoPin 32 //Set to GPIO 35
#define VREF 3.3 //VREF (mv)
#define ADC_RES 4096 //ADC Resolution
#define SOUND_SPEED 0.034
#define CM_TO_INCH 0.393701
long duration;
float distanceCm;
float distanceInch;
// pH sensor setup
DFRobot_ESP_PH_WITH_ADC ph;
//SET RELAY PINS
#define inlet_valve_relay 21
#define pump_out_relay 16
//define blynk switch variable
int mode = 0;
int inlet_switch = 0;
int pump_out_switch = 0;
//bool filter_switch = true;
int percentage_level;
float pHValue;
//VALVE = 8, SMALL PUMP = 9, FILTER = 7, MANUAL CONTROL = 10
BLYNK_WRITE(V10){
mode = param.asInt();
}
BLYNK_WRITE(V8){
inlet_switch = param.asInt();
digitalWrite(inlet_valve_relay, inlet_switch);
}
BLYNK_WRITE(V9){
pump_out_switch = param.asInt();
digitalWrite(pump_out_relay, pump_out_switch);
}
int dissolved_resend;
int temp_resend;
int salinity_resend;
BLYNK_WRITE(V1){
int dissolved_resend = param.asInt();
}
BLYNK_WRITE(V0){
int temp_resend = param.asInt();
}
BLYNK_WRITE(V2){
int salinity_resend = param.asInt();
}
void resend(){
Blynk.virtualWrite(V13, dissolved_resend);
Blynk.virtualWrite(V14, temp_resend);
Blynk.virtualWrite(V15, temp_resend);
}
//Water Level
void ControlWaterLevel(){
// pH reading
float voltagePH = analogRead(PH_PIN) / 4096.0 * 3300;
float phValue = ph.readPH(voltagePH, 25);
ph.calibration(voltagePH, 25);
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Reads the echoPin, returns the sound wave travel time in microseconds
duration = pulseIn(echoPin, HIGH);
// Calculate the distance
distanceCm = duration * SOUND_SPEED/2;
// Convert to inches
distanceInch = distanceCm * CM_TO_INCH;
int sonicdistance = 8;
float percentage_level = 100 - ((distanceInch-4)/(sonicdistance))*100;
if (mode == 1){
}
else{
if (phValue < 7 && phValue > 8.5){
if(percentage_level < 30){ // less than
digitalWrite(inlet_valve_relay, HIGH); // Turn on fill pump
digitalWrite(pump_out_relay, LOW); // Turn off drain pump
delay(5000); // Adjust the delay as needed for draining time
}
else if (percentage_level > 90) { // more than
digitalWrite(pump_out_relay, HIGH); // Turn on fill pump
digitalWrite(inlet_valve_relay, LOW); // Turn off fill pump
delay(5000); // Adjust the delay as needed for filling time
}
else{
digitalWrite(inlet_valve_relay,LOW);
digitalWrite(pump_out_relay, LOW);
Blynk.virtualWrite(V9, 0);
Blynk.virtualWrite(V8, 0);
delay(3000);
}
}
else if (percentage_level < 95 && phValue >= 7 && phValue <=8.5){
digitalWrite(inlet_valve_relay, HIGH);
Blynk.virtualWrite(inlet_valve_relay, 1); // Turn on fill pump
delay(5000);
}
else{
digitalWrite(inlet_valve_relay,LOW); // low
digitalWrite(pump_out_relay, LOW); // low
Blynk.virtualWrite(V9, 0);
Blynk.virtualWrite(V8, 0);
delay(5000);
}
}
}
void setup() {
Serial.begin(115200);
// pH sensor setup
ph.begin();
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output`
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
pinMode(inlet_valve_relay, OUTPUT); // Sets the inlet as an Output`
pinMode(pump_out_relay, OUTPUT); // Sets the pump as an Output`
//SET INITIAL RELAY STATE AT O
digitalWrite(inlet_valve_relay, inlet_switch);
digitalWrite(pump_out_relay, pump_out_switch);
Blynk.virtualWrite(V8,1); /// supposed to be low
Blynk.virtualWrite(V9,1);
Blynk.begin(auth, ssid, pass);
//SET TIMEER INTERVAL FOR EACH FUNCTION EX.1000L
timer.setInterval(5000L, sendPH);
timer.setInterval(3000L, sendWaterLevel);
//timer.setInterval(5000L, ControlWaterLevel);
timer.setInterval(1000L, resend);
}
void sendPH(){
// pH reading
float voltagePH = analogRead(PH_PIN) / 4096.0 * 3300;
float phValue = ph.readPH(voltagePH, 25);
ph.calibration(voltagePH, 25);
Blynk.virtualWrite(V3,phValue);
}
void sendWaterLevel(){
// Clears the trigPin
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Reads the echoPin, returns the sound wave travel time in microseconds
duration = pulseIn(echoPin, HIGH);
// Calculate the distance
distanceCm = duration * SOUND_SPEED/2;
// Convert to inches
distanceInch = distanceCm * CM_TO_INCH;
int sonicdistance = 8;
float percentage_level = 100 - ((distanceInch-4)/(sonicdistance))*100;
Blynk.virtualWrite(V4,percentage_level);
}
void loop(){
//ControlWaterLevel();
//8delay(5000);
Blynk.run();
timer.run();
}}```