/*
************************************************************************************************************
Author: Siddhant Sangai
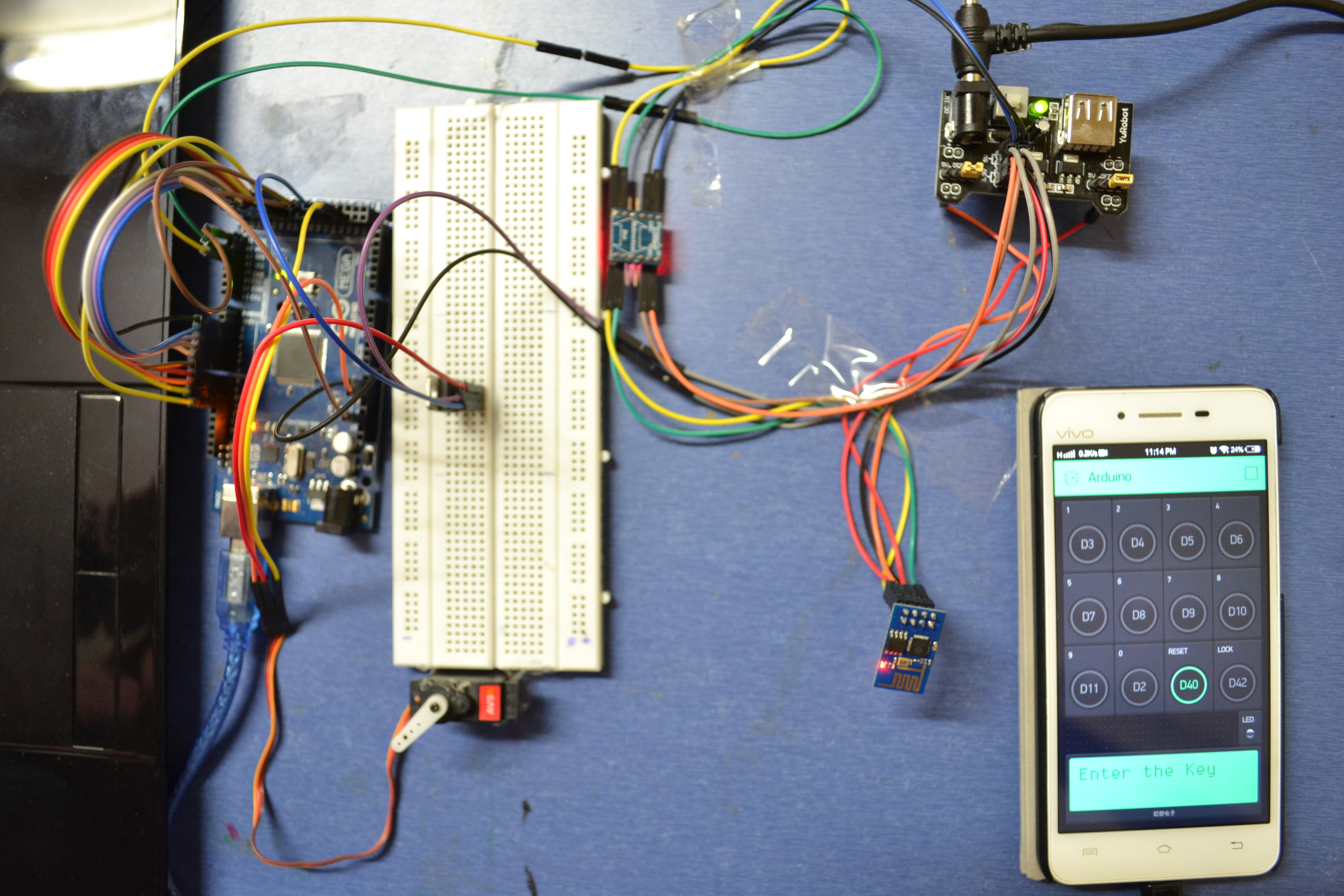
Name of the Project: 5 digit Wireless lock.
Hardware Used: Arduino Mega, ESP8266, Logic level shifter(bidirectional), External Power supply for ESP8266
Software Used: Blynk
Email: siddhantsangai787@gmail.com
************************************************************************************************************
*/
//#define BLYNK_DEBUG
#define BLYNK_PRINT Serial // Comment this out to disable prints and save space
#define EspSerial Serial1 // Set ESP8266 Serial object
#include <ESP8266_HardSer.h>
#include <BlynkSimpleShieldEsp8266_HardSer.h>
#include <Servo.h>
ESP8266 wifi(EspSerial);
WidgetLCD lcd(1);
WidgetLED led(2);
int masterKey[5];
int key[5];
int flag = 0;
int statusOfBlynkInput;
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 0; // variable to store the servo position
// You should get Auth Token in the Blynk App.
// Go to the Project Settings (nut icon).
char auth[] = "YourAuthToken";
void setup()
{
myservo.attach(48); //attach the servo at pin no 48 of the Arduinio mega.
pinMode(44, OUTPUT); //Enable for the Servo.
digitalWrite(44, LOW);
pinMode(42, OUTPUT); // On Blynk Dashboard for Relocking the Door
pinMode(21, INPUT); // Connected to pin 42
for (int m = 0; m < 10; m++)
{
pinMode(m + 24, INPUT);
pinMode(m + 2, OUTPUT);
}
// Set console baud rate
Serial.begin(9600);
delay(10);
// Set ESP8266 baud rate
EspSerial.begin(115200);
delay(10);
Blynk.begin(auth, wifi, "SSID", "Password");
while (Blynk.connect() == false)
{
// Wait until connected
}
lcd.clear();
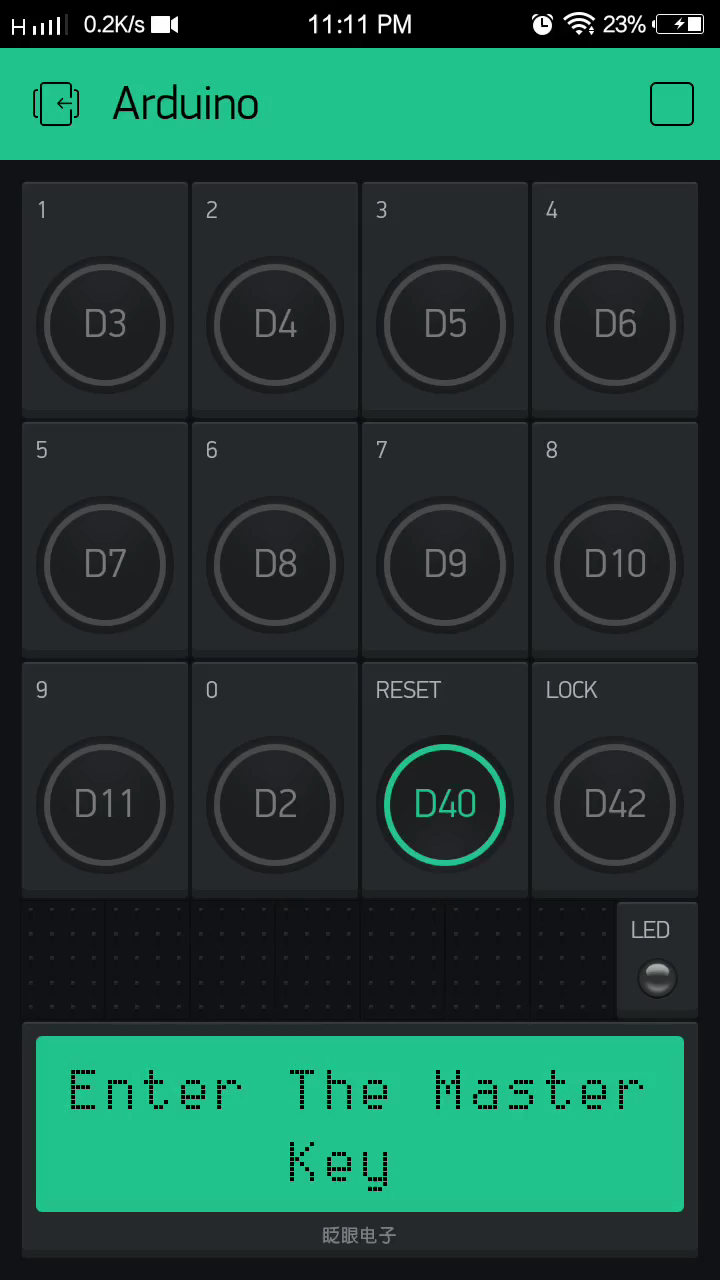
lcd.print(0, 0, "Enter The Master");
lcd.print(0 , 1, " Key ");
delay(1000);
lcd.clear();
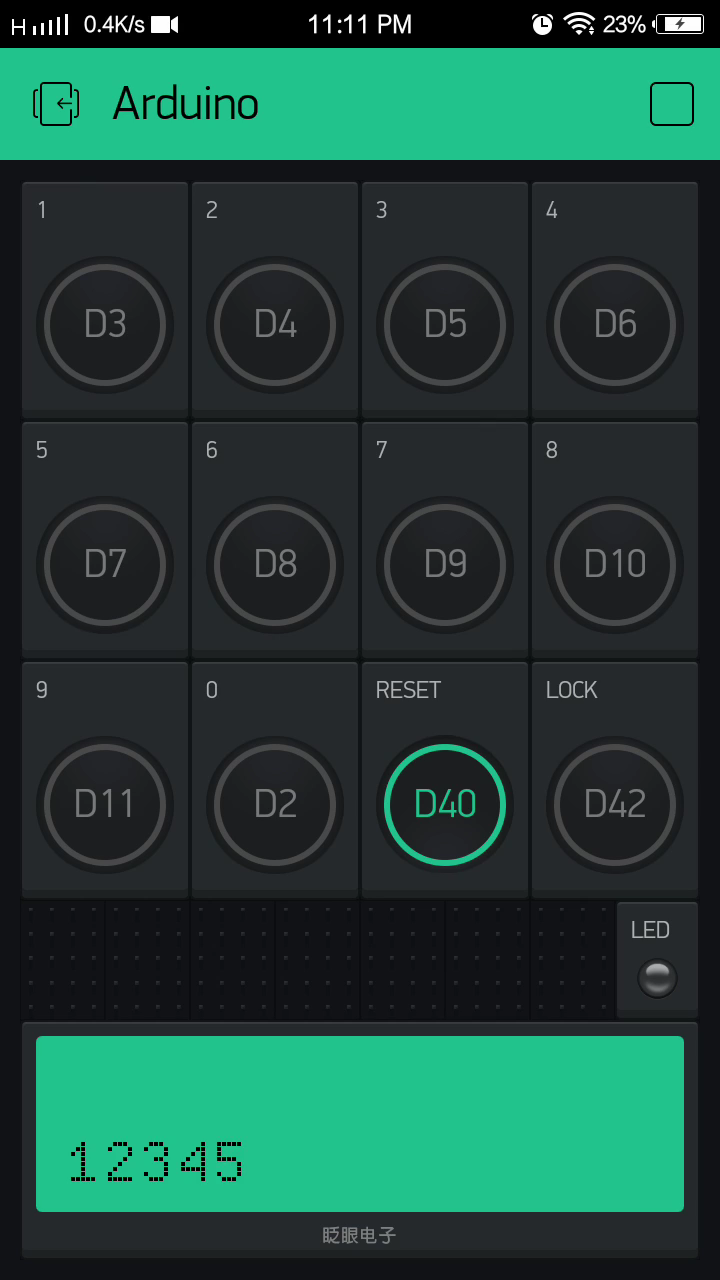
for (int count = 0; count < 5; count++)// Loop for a 5 digit Key
{
Blynk.run();
masterKey[count] = keypadBlynk(count);
}
lcd.clear();
}
void loop()
{
Blynk.run();
if (flag == 0)
{
digitalWrite(44, HIGH);
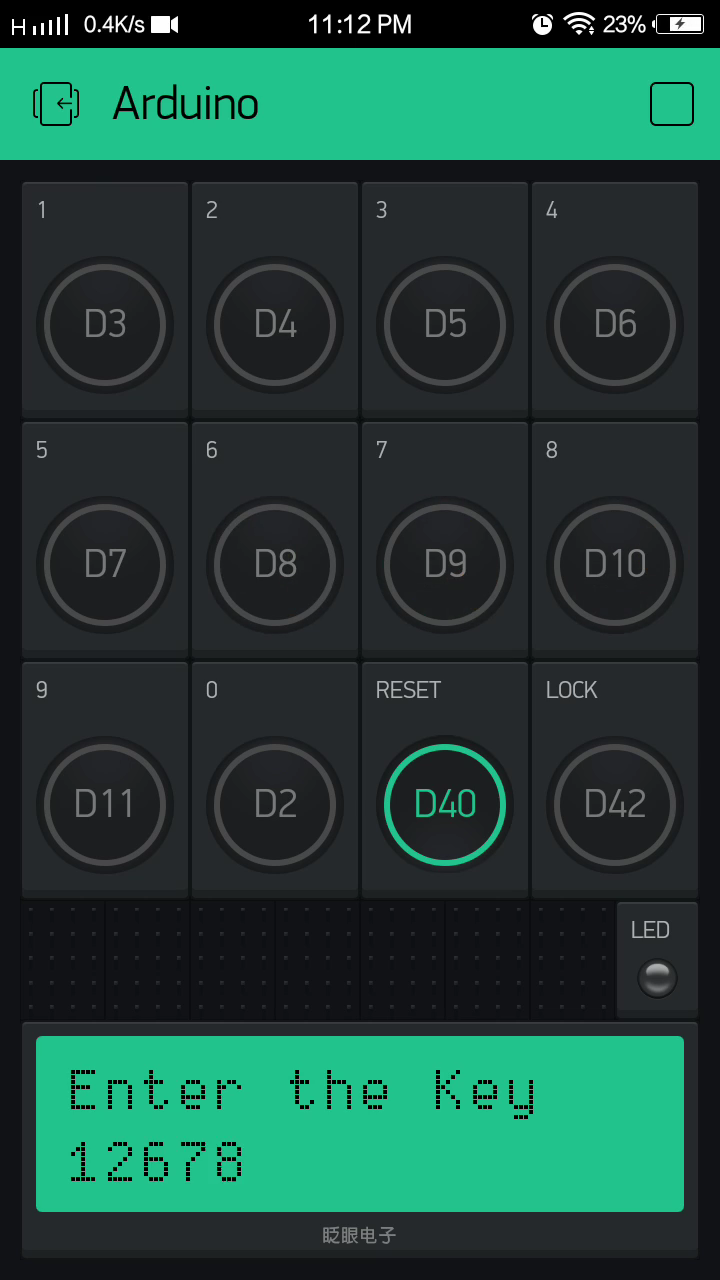
lcd.print(0, 0, "Enter the Key");
for (int count = 0; count < 5; count++)
{
Blynk.run();
key[count] = keypadBlynk(count);
}
if (key[0] == masterKey[0] && key[1] == masterKey[1] && key[2] == masterKey[2] && key[3] == masterKey[3] && key[4] == masterKey[4])
{
flag = 1;
for (pos = 0; pos <= 180; pos += 1) // goes from 0 degrees to 180 degrees
{
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15);
}
lcd.clear();
lcd.print(0, 0, "Lock Open");
led.on();
digitalWrite(44, LOW);
}
else
{
flag = 0;
lcd.clear();
lcd.print(0, 0, "Incorrect Key");
lcd.print(0, 1, "Please try again");
delay(1000);
lcd.clear();
}
}
if (digitalRead(21) == HIGH) // condition to relock the system.
lock();
}
/*********************************************************************************************
Blynk Keypad Initialization
*********************************************************************************************/
int keypadBlynk(int count)
{
Blynk.run();
int keyBlynk = 0;
int statusOfPin = LOW;
while (statusOfPin != HIGH)
{
//lcd.print(0, 0, "Enter the Key");
Blynk.run();
for (int num = 24; num < 34; num++)
{
statusOfPin = digitalRead(num);
if (statusOfPin == HIGH)
{
keyBlynk = num - 24;
num = 34;
}
}
}
lcd.print(count, 1, keyBlynk);
return keyBlynk;
}
/***********************************************************************************************
Initialization of the Locking module
***********************************************************************************************/
void lock()
{
digitalWrite(44, HIGH);
Blynk.run();
flag = 0;
led.off();
for (pos = 180; pos >= 0; pos -= 1) // goes from 180 degrees to 0 degrees
{
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15);
}
digitalWrite(44, LOW);
}
6 Likes
Great project!  Thanks for sharing!
Thanks for sharing!
As an idea: maybe it’s good not to show the code and put ***** instead?
Pretty cool project, what is the lock’s application? I can think of several great uses for this, just curious how you applied this…
brian
Thanks Brian! Sorry for my late reply.
I was thinking of trying this out at my own place, but you see there are a few practical problems.
The ESP8266 has a history, if by any chance it disconnects form the internet it does not connect itself also it is not that stable and that would cause some trouble.
I have not worked on this idea lately, once i find the solution to these problems i will share some real life applications.
Siddhant
Sure Sir. Will work on it soon.