Hi, I am currently developing a project to measure the distance from 3 hcsr04 ultrasonic sensors using Arduino Mega. I run my coding on Mega and the value output for all 3 sensors on Serial Monitor are accurate. Then, I changed my Mega to Arduino UNO, and the 3rd sensor value output is suddenly wrong. The rest is okay.
here is my coding (Working on Mega, but wrong value for 3rd Sensor on UNO)
/*********************************************************************************
SMART PARKING LOT SYSTEM
*********************************************************************************/
//Reference Value to Get The Status of Parking
#define g_parked 100
#define g_fault 4500
//Pin Setting for the 3 Ultrasonic Sensors
#define g_trigPin 13
#define g_echoPin 12
#define g_trigPin2 4
#define g_echoPin2 5
#define g_trigPin3 8
#define g_echoPin3 9
/**************************************************************************************
Function Name : setup
Description : Initialize the Sensor Trigger Pin as Output and
echo pin as Input and begin the serial communication
with 9600 BAUD
Parameters : void
Return : void
**************************************************************************************/
//Initialize the Pins and BAUD rate
void setup(void) {
Serial1.begin (9600);
Serial.begin(9600);
pinMode(g_trigPin, OUTPUT);
pinMode(g_echoPin, INPUT);
pinMode(g_trigPin2, OUTPUT);
pinMode(g_echoPin2, INPUT);
pinMode(g_trigPin3, OUTPUT);
pinMode(g_echoPin3, INPUT);
}
/**************************************************************************************
Function Name : loop
Description : Generate a Trigger signal and wait for the echo on
HC-SR04 Ultrasonic Sensor and calculate the distance.
Parameters : void
Return : void
**************************************************************************************/
void loop(void) {
//Variables to calculate the distance using the duration taken for 1 cycle of trigger and echo
long l_duration,l_distance,l_duration2,l_distance2,l_duration3,l_distance3;
//Distance form the Ultrasonic Sensor 1
//Generate a high pulse on Trigger Pin with 10 micro seconds delay and wait for the echo
digitalWrite(g_trigPin, LOW);
delayMicroseconds(2);
digitalWrite(g_trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(g_trigPin, LOW);
//Once received the Echo calculate the distance from the duration
l_duration = pulseIn(g_echoPin, HIGH);
l_distance = (l_duration/2) / 29.1;
delay(300);
//Distance form the Ultrasonic Sensor 2
digitalWrite(g_trigPin2, LOW);
delayMicroseconds(2);
digitalWrite(g_trigPin2, HIGH);
delayMicroseconds(10);
digitalWrite(g_trigPin2, LOW);
l_duration2 = pulseIn(g_echoPin2, HIGH);
l_distance2 = (l_duration2/2) / 29.1;
delay(300);
//Distance form the Ultrasonic Sensor 3
digitalWrite(g_trigPin3, LOW);
delayMicroseconds(2);
digitalWrite(g_trigPin3, HIGH);
delayMicroseconds(10);
digitalWrite(g_trigPin3, LOW);
l_duration3 = pulseIn(g_echoPin3, HIGH);
l_distance3 = (l_duration3/2) / 29.1;
delay(300);
Serial.println(l_distance);
Serial.println(l_distance2);
Serial.println(l_distance3);
Serial.println("\n\n\n");
//Check if the Sensor has any fault
/*DATA SENT by UART to RPi is 1,2,3
1 - Parking LOT is Free
2 - Parking LOT is Filled
3 - Fault in the Sensor */
if(l_distance < g_fault && l_distance2 < g_fault && l_distance3 < g_fault)
{
if(l_distance <= g_parked && l_distance2 <= g_parked && l_distance3 <= g_parked)
{
Serial1.write("222");
}
else if(l_distance <= g_parked && l_distance2 <= g_parked && l_distance3 > g_parked)
{
Serial1.write("221");
}
else if(l_distance <= g_parked && l_distance2 > g_parked && l_distance3 <= g_parked)
{
Serial1.write("212");
}
else if(l_distance <= g_parked && l_distance2 > g_parked && l_distance3 > g_parked)
{
Serial1.write("211");
}
else if(l_distance > g_parked && l_distance2 <= g_parked && l_distance3 <= g_parked)
{
Serial1.write("122");
}
else if(l_distance > g_parked && l_distance2 <= g_parked && l_distance3 > g_parked)
{
Serial1.write("121");
}
else if(l_distance > g_parked && l_distance2 > g_parked && l_distance3 <= g_parked)
{
Serial1.write("112");
}
else if(l_distance > g_parked && l_distance2 > g_parked && l_distance3 > g_parked)
{
Serial1.write("111");
}
}
else
{
if(l_distance > g_fault && l_distance2 <= g_parked && l_distance3 <= g_parked)
{
Serial1.write("322");
}
else if(l_distance > g_fault && l_distance2 <= g_parked && l_distance3 > g_parked)
{
Serial1.write("321");
}
else if(l_distance > g_fault && l_distance2 > g_parked && l_distance3 <= g_parked)
{
Serial1.write("312");
}
else if(l_distance > g_fault && l_distance2 > g_parked && l_distance3 > g_parked)
{
Serial1.write("311");
}
else if(l_distance <= g_parked && l_distance2 > g_fault && l_distance3 <= g_parked)
{
Serial1.write("232");
}
else if(l_distance <= g_parked && l_distance2 > g_fault && l_distance3 > g_parked)
{
Serial1.write("231");
}
else if(l_distance > g_parked && l_distance2 > g_fault && l_distance3 <= g_parked)
{
Serial1.write("132");
}
else if(l_distance > g_parked && l_distance2 > g_fault && l_distance3 > g_parked)
{
Serial1.write("131");
}
else if(l_distance <= g_parked && l_distance2 <= g_parked && l_distance3 > g_fault)
{
Serial1.write("223");
}
else if(l_distance <= g_parked && l_distance2 > g_parked && l_distance3 > g_fault)
{
Serial1.write("213");
}
else if(l_distance > g_parked && l_distance2 <= g_parked && l_distance3 > g_fault)
{
Serial1.write("123");
}
else if(l_distance > g_parked && l_distance2 > g_parked && l_distance3 > g_fault)
{
Serial1.write("113");
}
else if(l_distance > g_fault && l_distance2 > g_fault && l_distance3 <= g_parked)
{
Serial1.write("332");
}
else if(l_distance > g_fault && l_distance2 > g_fault && l_distance3 > g_parked)
{
Serial1.write("331");
}
else if(l_distance <= g_parked && l_distance2 > g_fault && l_distance3 > g_fault)
{
Serial1.write("233");
}
else if(l_distance > g_parked && l_distance2 > g_fault && l_distance3 > g_fault)
{
Serial1.write("133");
}
else if(l_distance > g_fault && l_distance2 <= g_parked && l_distance3 > g_fault)
{
Serial1.write("323");
}
else if(l_distance > g_fault && l_distance2 > g_parked && l_distance3 > g_fault)
{
Serial1.write("313");
}
else if(l_distance > g_fault && l_distance2 > g_fault && l_distance3 > g_fault)
{
Serial1.write("333");
}
}
//Provide a Delay for every 5 Seconds once data sent to the RPi
delay(500);
}
//End of the Program
/***************************************************************************************************/
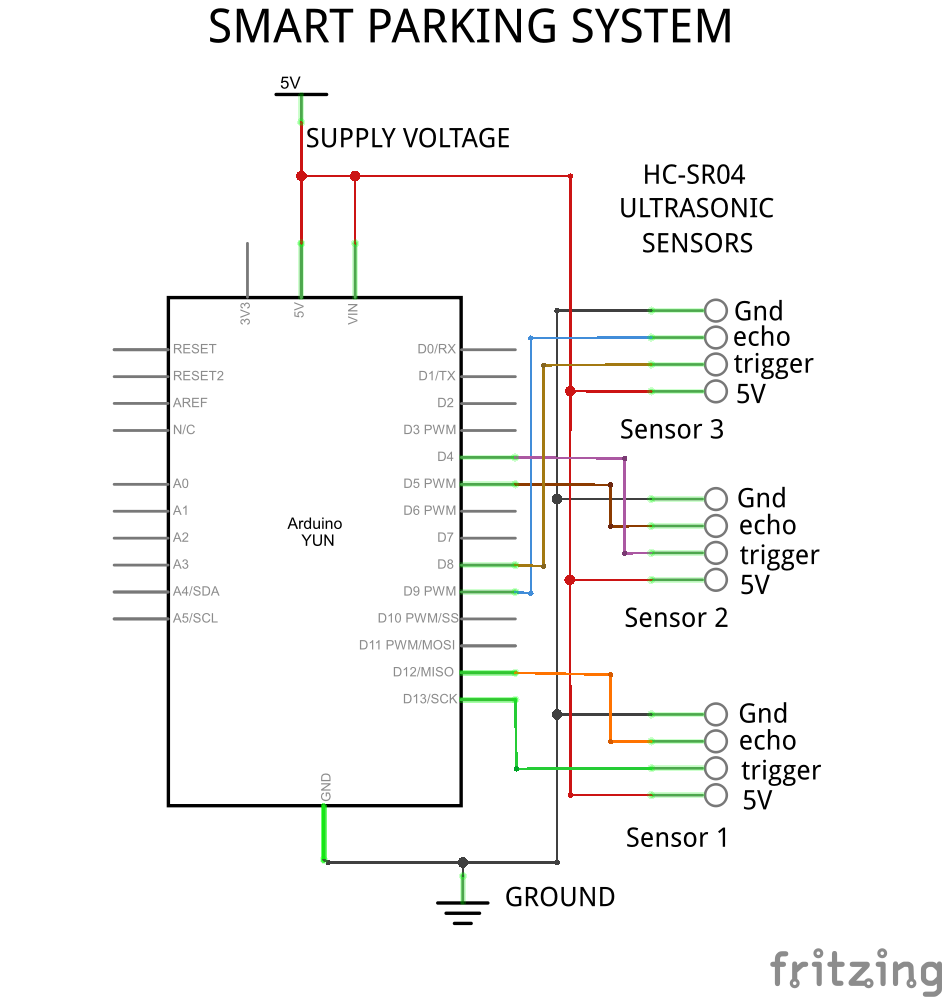
Below is the schematic diagram to Arduino (Both UNO and Mega)