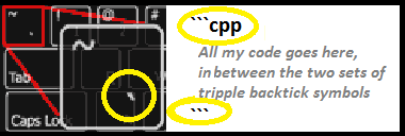
I had to edit your post to correct the posted code for proper viewing, as shown in the Forum’s Welcome Topic…
As for you question… well… I didn’t understand your question But it seems you are unsure of what a virtual pin is, and how to use it. So here is a link to the Blynk Help Pages; It and other great resources are available at the upper right of this page.