No one would be editing your comments or anything like that without good reason… however we do “edit” the code postings for better visuals.
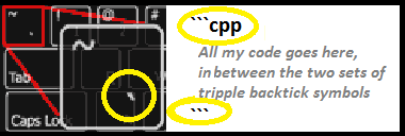
Unfortunately the </> formatted text button doesn’t always work for C++ code. The correct way, as shown in the Welcome Topic… that many unfortunately skip over, is to paste your sketch, but then place three backticks and the letters cpp at the beginning and three more backticks at the end of the code, this way it shows up proper.