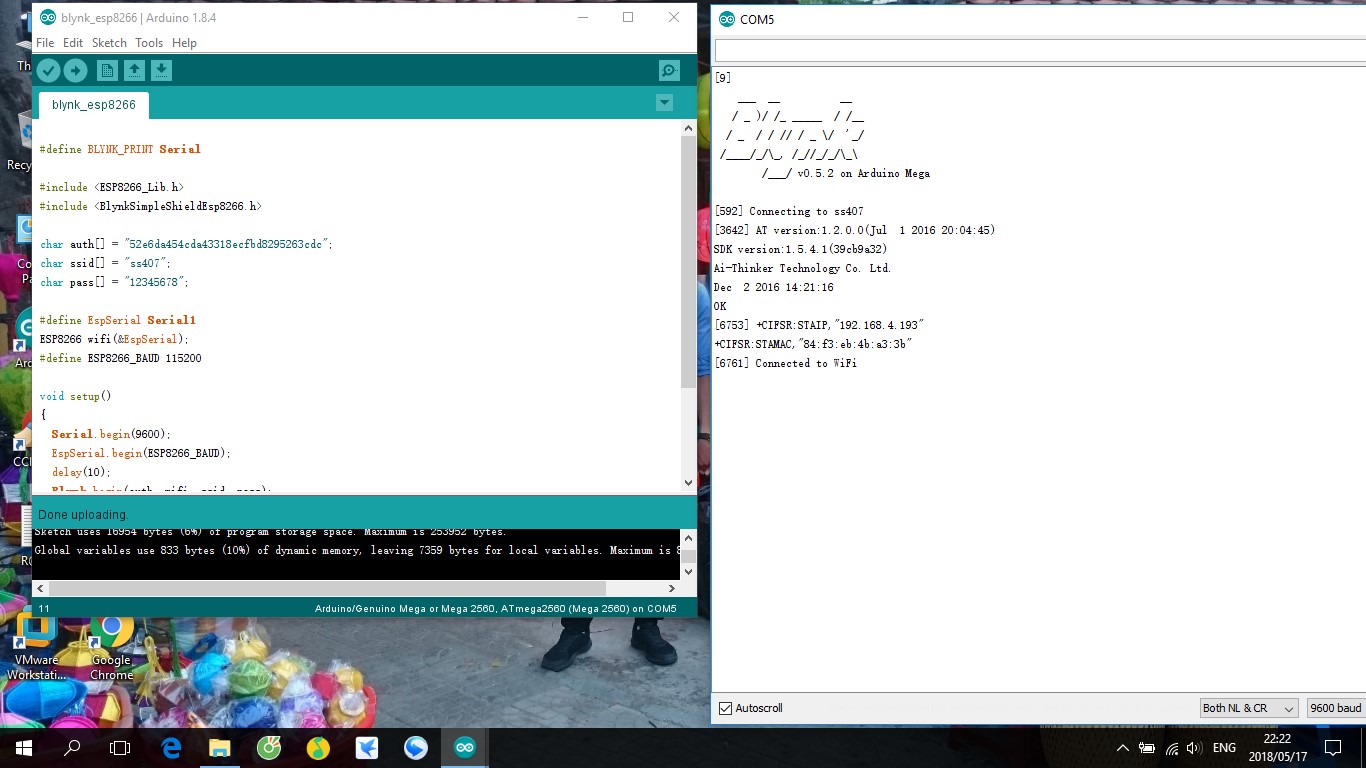
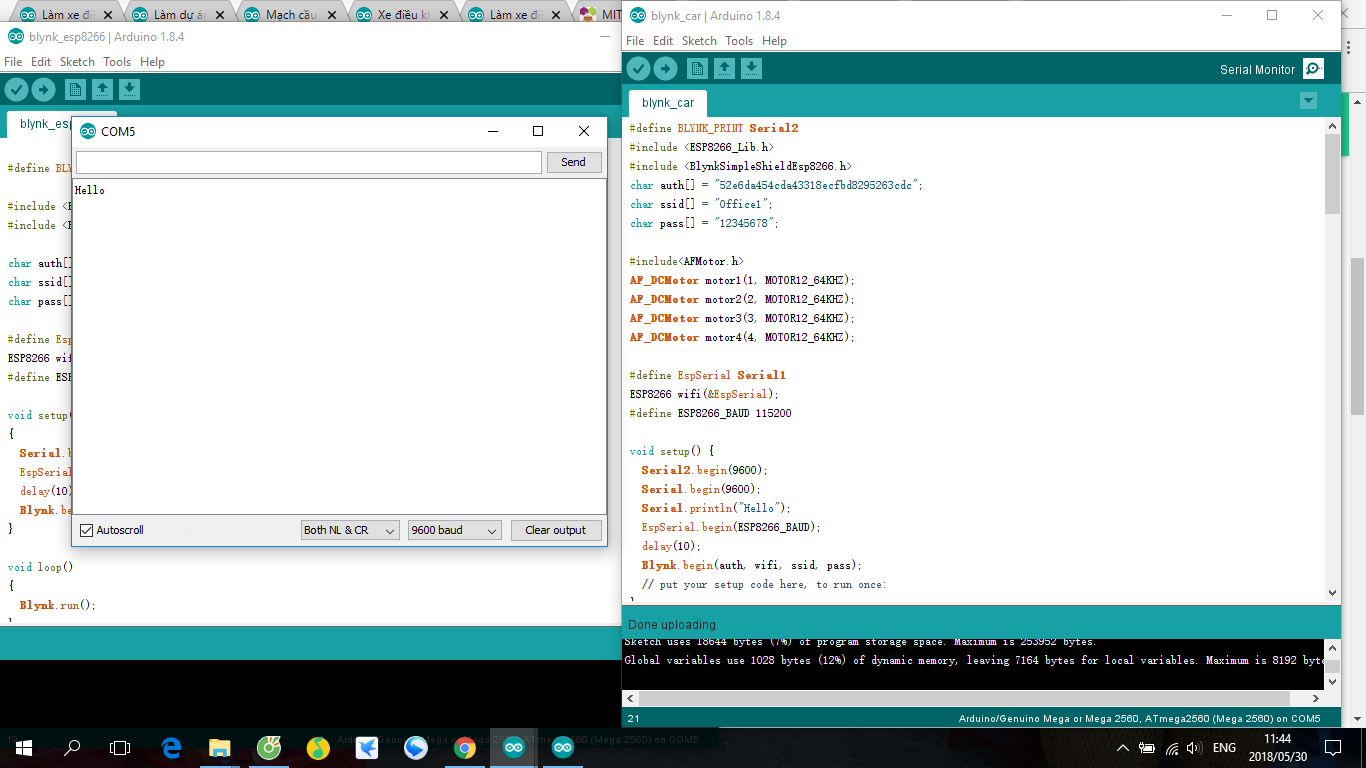
Chào mọi người ạ. Em đang làm ô tô điều khiển từ xa qua app Blynk, sử dụng Arduino Mega 2560, module ESP 8266, và Motor Shield L293D. và đây là Code của e ạ. Có ai đã từng làm hay rành về phần này cho e hỏi chút đc k ạ? khi Upload k có vấn đề gì mà khi mở Serial Monitor chả hiện ra gì cả.
When I opened the Serial Monitor, it does not display anything.
#define BLYNK_PRINT Serial2
#include <ESP8266_Lib.h>
#include <BlynkSimpleShieldEsp8266.h>
char auth[] = "52e6da454cxxxxxxxxxxfbd8295263cdc";
char ssid[] = "ss407";
char pass[] = "12345678";
#include<AFMotor.h>
AF_DCMotor motor1(1, MOTOR12_64KHZ);
AF_DCMotor motor2(2, MOTOR12_64KHZ);
AF_DCMotor motor3(3, MOTOR12_64KHZ);
AF_DCMotor motor4(4, MOTOR12_64KHZ);
#define EspSerial Serial1
ESP8266 wifi(&EspSerial);
#define ESP8266_BAUD 115200
void setup() {
Serial2.begin(9600);
Serial.begin(9600);
Serial.println("Hello");
EspSerial.begin(ESP8266_BAUD);
delay(10);
Blynk.begin(auth, wifi, ssid, pass);
// put your setup code here, to run once:
}
void motorForward(){
motor1.setSpeed(95);
motor1.run(FORWARD);
motor2.setSpeed(95);
motor2.run(FORWARD);
motor3.setSpeed(95);
motor3.run(FORWARD);
motor4.setSpeed(95);
motor4.run(FORWARD);
}
void motorBackward(){
motor1.setSpeed(95);
motor1.run(BACKWARD);
motor2.setSpeed(95);
motor2.run(BACKWARD);
motor3.setSpeed(95);
motor3.run(BACKWARD);
motor4.setSpeed(95);
motor4.run(BACKWARD);
}
void motorTurnLeft(){
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.setSpeed(95);
motor4.setSpeed(95);
motor3.run(FORWARD);
motor4.run(FORWARD);
}
void motorTurnRight(){
motor1.setSpeed(95);
motor2.setSpeed(95);
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(RELEASE);
motor4.run(RELEASE);
}
void motorLeftBack(){
motor1.setSpeed(50);
motor1.run(BACKWARD);
motor2.setSpeed(50);
motor2.run(BACKWARD);
motor3.setSpeed(95);
motor3.run(BACKWARD);
motor4.setSpeed(95);
motor4.run(BACKWARD);
}
void motorRightBack(){
motor1.setSpeed(95);
motor1.run(BACKWARD);
motor2.setSpeed(95);
motor2.run(BACKWARD);
motor3.setSpeed(50);
motor3.run(BACKWARD);
motor4.setSpeed(50);
motor4.run(BACKWARD);
}
void motorLeftForward(){
motor1.setSpeed(50);
motor1.run(FORWARD);
motor2.setSpeed(50);
motor2.run(FORWARD);
motor3.setSpeed(95);
motor3.run(FORWARD);
motor4.setSpeed(95);
motor4.run(FORWARD);
}
void motorRightForward(){
motor1.setSpeed(95);
motor1.run(FORWARD);
motor2.setSpeed(95);
motor2.run(FORWARD);
motor3.setSpeed(50);
motor3.run(FORWARD);
motor4.setSpeed(50);
motor4.run(FORWARD);
}
void motorstop(){
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
}
void loop() {
Blynk.run();
// put your main code here, to run repeatedly:
}
BLYNK_WRITE(V1){
int x = param[0].asInt();
int y = param[1].asInt();
if(x==-1 && y==-1){ //BackWard and Left
motorLeftBack();
}else if(x==-1 && y==0){ //Left Turn
motorTurnLeft();
}else if(x==-1 && y==1){ //Forward and Left
motorLeftForward();
}else if(x==0 && y==-1){ //BackWard
motorBackward();
}else if(x==0 && y==0){ //Stay
motorstop();
}else if(x==0 && y==1){ //Forward
motorForward();
}else if(x==1 && y==-1){ //Backward and Right
motorRightBack();
}else if(x==1 && y==0){ //Right turn
motorTurnRight();
}else if(x==1 && y==1){ //Forward and Right
motorRightForward();
}
}