Hi,
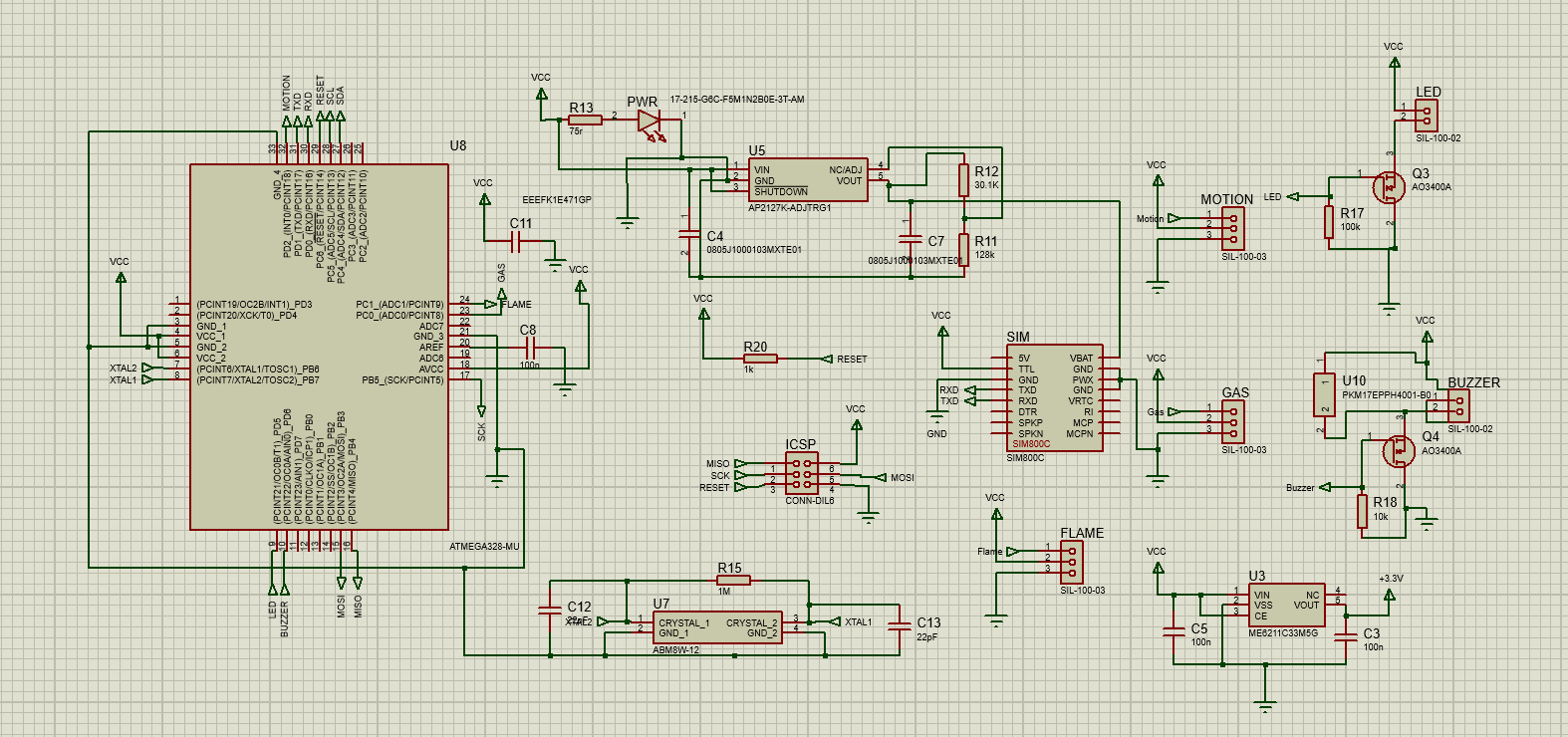
I am working on a project that involves, a Sim800C Module connected to an ATmega328(Same chip as Arduino UNO, Nano) using Hardware Serial. 3 Sensors which are a flame Sensor, Gas Sensor, and a Motion Sensor. As outputs, I have an Led and a buzzer. I fabricated a PCB online and soldered all the components.
When I uploaded the simple GSM example the SIM800 Module connects successfully and I am able to control an led on and off. I noticed that the led has a very small delay when pressing the button on the app and it lighting up. But that is to be expected since it is not a fast connection. When I upload a more complex code the buttons do not work most of the time and to turn the same led using the Button on the app I have to press the button repeatedly for it to turn on and off. It is acting like the ATmega328 is freezing. Blynk does not disconnect but no buttons work.
I also tried the same code (with esp8266 specific libraries) and it worked normally and instantly. After this I am 99% sure that this is because of the Chip but I just wanted to be sure before I scrap the GSM connection and opt for Wifi.
Sorry If I missed any info.
Regards,
Clayton
I have attached pictures of my Schematic, and both the Simple Code and the Alarm system Code
Schematic
Simple GSM Connection Code
// Select your modem:
#define TINY_GSM_MODEM_SIM800
#include <TinyGsmClient.h>
#include <BlynkSimpleTinyGSM.h>
// Hardware Serial on Mega, Leonardo, Micro
#define SerialAT Serial
// Your GPRS credentials
// Leave empty, if missing user or pass
const char apn[] = "RTGsurfing";
const char user[] = "";
const char pass[] = "";
// You should get Auth Token in the Blynk App.
// Go to the Project Settings (nut icon).
const char auth[] = "VCalXXXXXXXXXXXXXXXXXIKwP";
TinyGsm modem(SerialAT);
void setup()
{
pinMode(5, OUTPUT); //Testing Led
digitalWrite( 5, 1);
delay(500);
digitalWrite(5, 0);
delay(500);
digitalWrite(5, 1);
delay(500);
digitalWrite(5, 0);
// Set GSM module baud rate
SerialAT.begin(115200);
delay(3000);
modem.restart();
Blynk.begin(auth, modem, apn, user, pass);
}
BLYNK_WRITE(V20) // At global scope (not inside of the function)
{
if ( param.asInt() == 1 )
{
digitalWrite(5, HIGH);
}
else
{
digitalWrite(5, LOW);
}
}
void loop()
{
Blynk.run();
}
Alarm System Code
#define TINY_GSM_MODEM_SIM800
#define BLYNK_HEARTBEAT 90
#include <TinyGsmClient.h>
#include <BlynkSimpleTinyGSM.h>
// Hardware Serial on Mega, Leonardo, Micro
#define SerialAT Serial
int MAX_VALUE_GAS = 800; //0 - 1023
int MAX_VALUE_FLAME = 400; //0 - 255
const long TIMEOUT_DELAY = 10000;
const char apn[] = "RTGsurfing";
const char user[] = "";
const char pass[] = "";
const char auth[] = "40xxxxxxxxxxxxxxxxxxxx2";
TinyGsm modem(SerialAT);
BlynkTimer timer;
//********************************************************
//Outputs
byte led_pin = 13;
byte buzzer_pin = 12;
//Input Pins
byte gas_pin = 0;
byte flame_pin = 1;
byte motion_pin = 2;
bool flameBTN = 0;
bool motionBTN = 0;
bool gasBTN = 0;
bool test = 0;
bool armBTN = 0;
bool motionDetected = 0;
bool flameDetected = 0;
bool gasDetected = 0;
bool alert = 0;
byte message = 0;
byte lastMessage = 1;
bool ledState = LOW;
unsigned long previousMillis = 0;
unsigned long currentMillis = 0;
const long interval = 1000;
WidgetLCD lcd(V6); //The LCD Widget on the device
void setup()
{
pinMode(5, OUTPUT);
digitalWrite(5, 1);
delay(500);
digitalWrite(5, 0);
delay(500);
digitalWrite(5, 1);
pinMode(led_pin, OUTPUT);
pinMode(buzzer_pin, OUTPUT);
// Set GSM module baud rate
SerialAT.begin(115200);
delay(3000);
modem.restart();
Blynk.begin(auth, modem, apn, user, pass);
Blynk.syncAll();
lcd.clear();
attachInterrupt(digitalPinToInterrupt(motion_pin), motionLoop, CHANGE);
timer.setInterval(3000L, control);
}
BLYNK_WRITE(V20) // At global scope (not inside of the function)
{
if ( param.asInt() == 1 )
{
digitalWrite(5, HIGH);
}
else
{
digitalWrite(5, LOW);
}
}
BLYNK_WRITE(V0) // At global scope (not inside of the function)
{
if ( param.asInt() == 1 )
{
armBTN = true;
lcd.print(0, 0, "Armed ");
}
}
BLYNK_WRITE(V1) // At global scope (not inside of the function)
{
if (param.asInt() == 1 )
{
armBTN = false;
lcd.print(0, 0, "Disarmed");
}
}
BLYNK_WRITE(V2) // At global scope (not inside of the function)
{
if (param.asInt() == 1)
{
motionBTN = true;
}
else
{
motionBTN = false;
}
}
BLYNK_WRITE(V3) //
{
if (param.asInt() == 1)
{
flameBTN = true;
}
else
{
flameBTN = false;
}
}
BLYNK_WRITE(V4) // At global scope (not inside of the function)
{
if (param.asInt() == 1)
{
gasBTN = true;
}
else
{
gasBTN = false;
}
}
BLYNK_WRITE(V5) // At global scope (not inside of the function)
{
if (param.asInt() == 1)
{
test = true;
}
else
{
test = false;
}
}
void motionLoop() { //runs everytime the Motion Sensor detects a change
if (digitalRead(motion_pin) == false) { //when a motion is detected
motionDetected = true; //Sets the motionDetected varible true
} else {
motionDetected = false; //Sets the motionDetected varible false
}
}
void control() { //this loop runs every 100ms
if (analogRead(gas_pin) > MAX_VALUE_GAS) { //When gas is detected set the variable
gasDetected = true; //to true
} else if (analogRead(gas_pin) < MAX_VALUE_GAS) {
gasDetected = false; //to false
}
if (analogRead(flame_pin) > MAX_VALUE_FLAME) { //When a flame is detected set the variable
flameDetected = true;// to true
} else if (analogRead(flame_pin) < MAX_VALUE_FLAME) {
flameDetected = false; //to flase
}
if (test == 1) { // when the test button is pressed the programm turns on the led and the buzzer until turned off
message = 4; //sets message variable to 4
}
else if (armBTN == 1) { //if the system is armed
if (motionBTN == 1 && motionDetected == 1) { //if motion button is turned on and motion was detected
message = 1;//set the variable to 1
} else if (flameBTN == 1 && flameDetected == 1) { //if flame button is turned on and a flame was detected
message = 2; //set the variable to 2
} else if (gasBTN == 1 && gasDetected == 1) { //if gas button is turned on and gas was detected
message = 3; //set the variable to 3
}
} else if (armBTN == 0) {
message = 0; //if the system is not active set the varibale to 0
}
if (message != lastMessage) {// used to make the message and the lcd update once
lcd.clear(); //clears the display
switch (message) {
case 0: lcd.print(0, 0, "Disarmed");
alert = 0; //turns on the buzzer and led
break;
case 1: lcd.print(0, 0, "Armed ");//Updates the display
lcd.print(0, 1, "Motion Detected"); //Motion Detected
Blynk.notify("Motion Detected!"); //Sends the notification
alert = 1; //turns on the buzzer and led
break;
case 2: lcd.print(0, 0, "Armed "); //Updates the display
lcd.print(0, 1, "Flame Detected"); //Flame Detected
Blynk.notify("Flame Detected!"); //Sends the notification
alert = 1; //turns on the buzzer and led
break;
case 3: lcd.print(0, 0, "Armed ");//Updates the display
lcd.print(0, 1, "Gas Detected"); //Gas Detected
alert = 1; //turns on the buzzer and led
Blynk.notify("Gas Detected!"); //Sends the notification
break;
case 4: lcd.print(0, 0, "Armed "); //Updates the display
lcd.print(0, 0, "Test"); //test
alert = 1;//turns on the buzzer and led
break;
default: //Nothing matched
break;
}
lastMessage = message;
}
}
void loop()
{
if (alert == 1) { //turns the buzer and led on and off every 1 second
currentMillis = millis();
if (currentMillis - previousMillis >= interval) {
previousMillis = currentMillis;
if (ledState == LOW) {
ledState = HIGH;
} else {
ledState = LOW;
}
}
digitalWrite(led_pin, ledState); //turnm
digitalWrite(buzzer_pin, HIGH);
} else {
previousMillis = currentMillis;
digitalWrite(led_pin, LOW);
digitalWrite(buzzer_pin, LOW);
}
timer.run();
Blynk.run();
}