Read this before creating new topic:
- Add details :
• Hardware model + communication type. ESP32
• Andriod Blynk
• Blynk server region US
• Blynk Library version 1.3.2
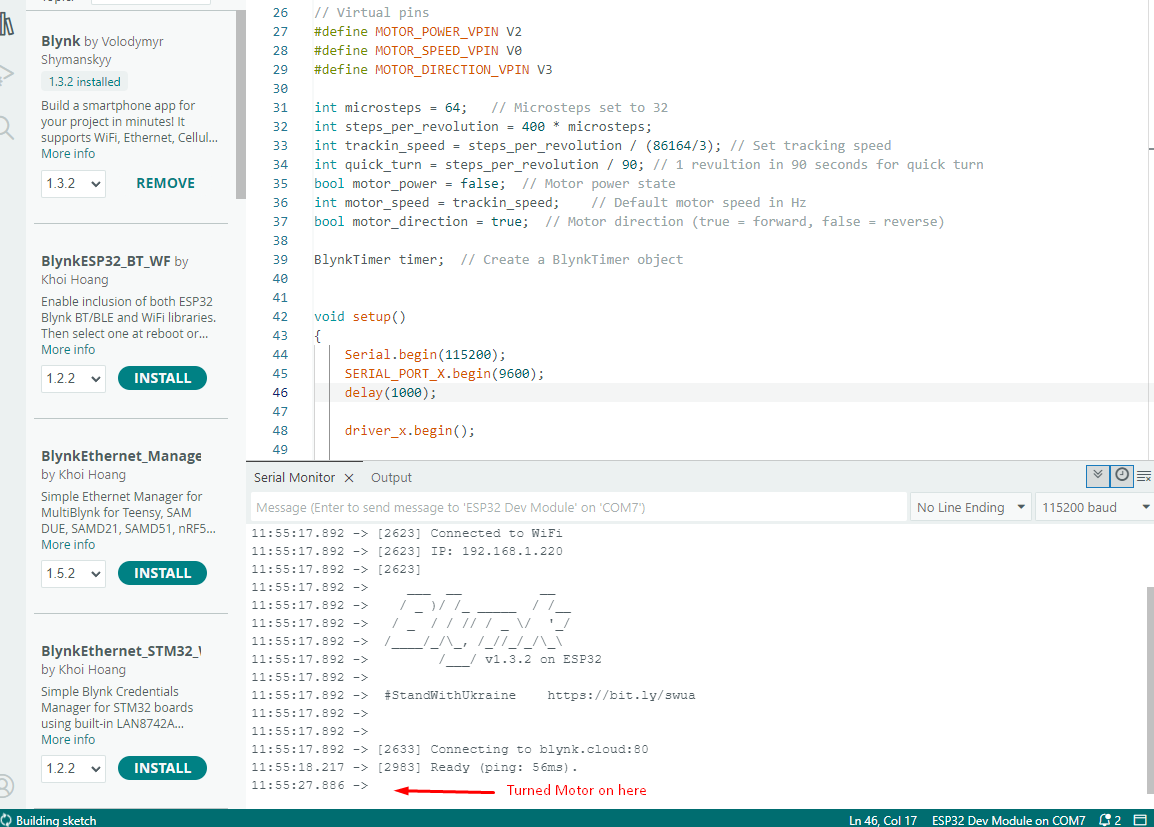
• Post your serial monitor output when experiencing some issues
#define BLYNK_TEMPLATE_ID "TMPL2ccrUxOP1"
#define BLYNK_TEMPLATE_NAME "Star tracker"
#define BLYNK_PRINT Serial
#include <Arduino.h>
#include <TMCStepper.h>
#include "FastAccelStepper.h"
#include <BlynkSimpleEsp32.h> // Include Blynk library for ESP32
#define SERIAL_PORT_X Serial1 // HardwareSerial port pins 9 & 10
#define DRIVER_ADDRESS 0b00 // TMC2209 Driver address according to MS1 and MS2
#define R_SENSE 0.11f // Match to your driver
TMC2209Stepper driver_x(&SERIAL_PORT_X, R_SENSE, DRIVER_ADDRESS);
FastAccelStepperEngine engine = FastAccelStepperEngine();
#define DIR_PIN_X 33
#define STEP_PIN_X 32
FastAccelStepper *motor_x = NULL;
// Virtual pins
#define MOTOR_POWER_VPIN V2
#define MOTOR_SPEED_VPIN V0
#define MOTOR_DIRECTION_VPIN V3
int microsteps = 64; // Microsteps set to 32
int steps_per_revolution = 400 * microsteps;
int trackin_speed = steps_per_revolution / (86164/3); // Set tracking speed
int quick_turn = steps_per_revolution / 90; // 1 revultion in 90 seconds for quick turn
bool motor_power = false; // Motor power state
int motor_speed = trackin_speed; // Default motor speed in Hz
bool motor_direction = true; // Motor direction (true = forward, false = reverse)
BlynkTimer timer; // Create a BlynkTimer object
void setup()
{
Serial.begin(115200);
SERIAL_PORT_X.begin(115200);
delay(1000);
driver_x.begin();
driver_x.toff(5);
driver_x.rms_current(600); // NOTE: 600 initially
driver_x.microsteps(microsteps); // Set initial microsteps
driver_x.pwm_autoscale(true);
driver_x.en_spreadCycle(true);
engine.init();
motor_x = engine.stepperConnectToPin(STEP_PIN_X);
motor_x->setDirectionPin(DIR_PIN_X);
motor_x->setSpeedInHz(motor_speed);
motor_x->setAcceleration(5000);
// Print initial settings
Serial.println("Motor initialized with the following settings:");
Serial.print("Microsteps: ");
Serial.println(microsteps);
Serial.print("Initial Speed (Hz): ");
Serial.println(motor_speed);
// Initialize Blynk
Blynk.begin(auth, ssid, pass, "blynk.cloud", 80);
timer.setInterval(1000L, loop); // Call handleMotorControl() every 100 ms
}
// Blynk function to control motor power
BLYNK_WRITE(MOTOR_POWER_VPIN) {
motor_power = param.asInt(); // Read virtual button state (0 or 1)
}
// Blynk function to control motor speed
BLYNK_WRITE(MOTOR_SPEED_VPIN) {
motor_speed = param.asInt(); // Read slider value (e.g., 100 to 2000 Hz)
}
// Blynk function to control motor direction
BLYNK_WRITE(MOTOR_DIRECTION_VPIN) {
int buttonState = param.asInt(); // Read virtual button state (0 or 1)
if (buttonState == 0) { // Button is OFF
digitalWrite(DIR_PIN_X, LOW); // Set direction to one way
} else if (buttonState == 1) { // Button is ON
digitalWrite(DIR_PIN_X, HIGH); // Set direction to the other way
}
}
void loop()
{
Blynk.run(); // Run Blynk
timer.run(); // Run the timer
if (motor_power) {
motor_x->setSpeedInHz(motor_speed);
Serial.printf("Motor speed set to %d Hz\n", motor_speed);
motor_x->setDirectionPin(motor_direction);
motor_x->move(400); // Move 400 steps
} else {
motor_x->stopMove(); // Stop the motor
}
}
GPIO 9 & 10 are special pins connected to the SPI flash memory.
To use Serial1 you need to re-map the UART to different pins.
Read this…
Pete.