Hello, I’m developing a project to use in my garage and I’m stuck somewhere.
Let me explain why I want to use this system. We are making improvements on our cars in our garage
Weight changes on the vehicle are important to us. Therefore, we need to obtain and evaluate information from 4 load cells separately. In this way, it can be ensured that 4 tires press on the ground with equal weight. If we can achieve this, it will allow the car to hold the ground more efficiently.
I set up the system as a small demo.
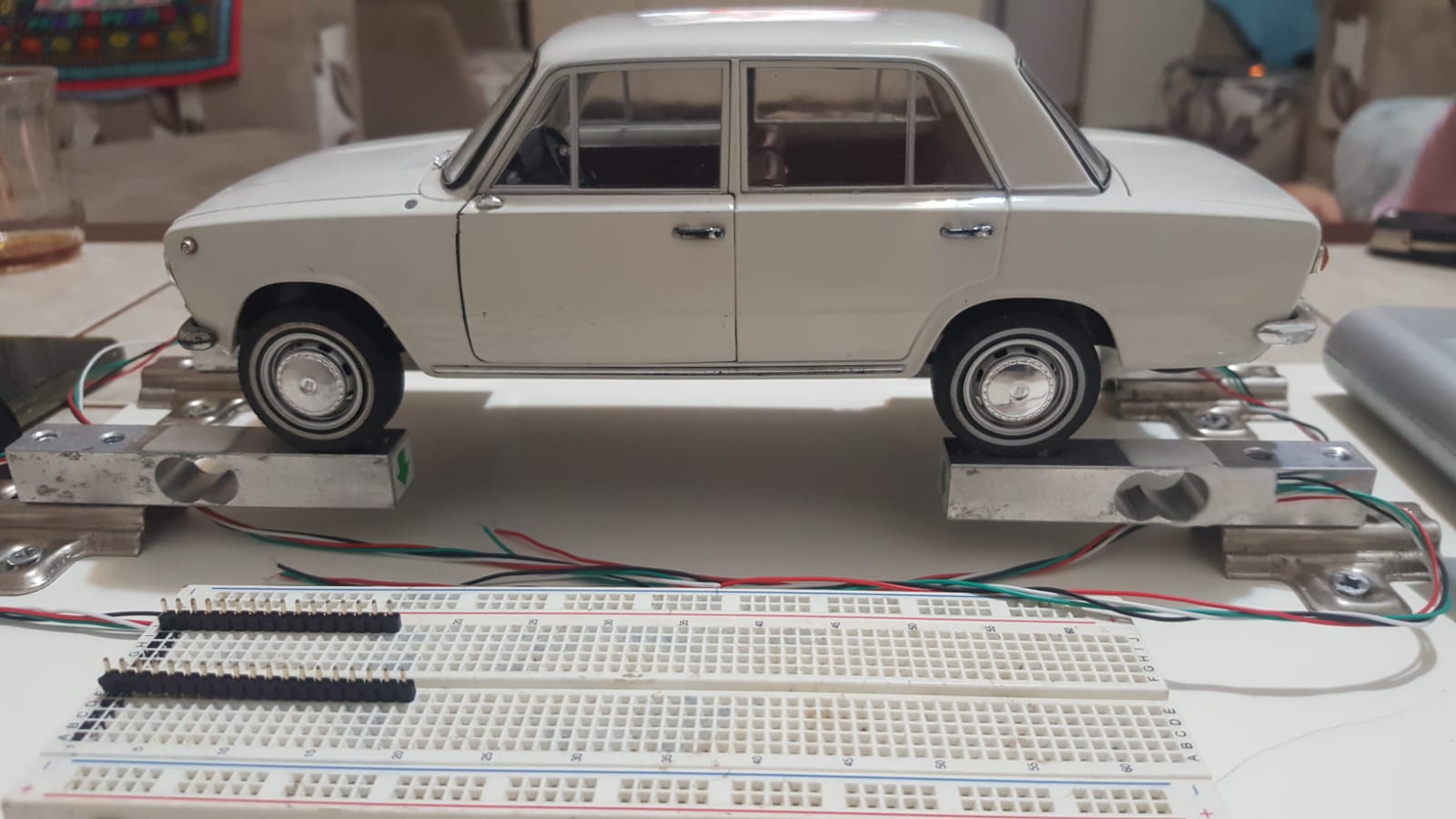
With the codes below, the system works on the Arduino IDE serial monitor as I want.
#include <HX711_ADC.h>
#if defined(ESP8266)|| defined(ESP32) || defined(AVR)
#include <EEPROM.h>
#endif
//pins:
const int HX711_dout_LF = 12; //mcu > LF dout pin
const int HX711_sck_LF = 14; //mcu > LF sck pin
const int HX711_dout_RF = 4; //mcu > RF dout pin
const int HX711_sck_RF = 0; //mcu > RF sck pin
const int HX711_dout_LR = 13; //mcu > LR dout pin
const int HX711_sck_LR = 15; //mcu > LR sck pin
const int HX711_dout_RR = 5; //mcu > RR dout pin
const int HX711_sck_RR = 16; //mcu > RR sck pin
//HX711 constructor (dout pin, sck pin)
HX711_ADC LoadCell_LF(HX711_dout_LF, HX711_sck_LF); //Left Front
HX711_ADC LoadCell_RF(HX711_dout_RF, HX711_sck_RF); //Right Front
HX711_ADC LoadCell_LR(HX711_dout_LR, HX711_sck_LR); //Left Rear
HX711_ADC LoadCell_RR(HX711_dout_RR, HX711_sck_RR); //Right Rear
const int calVal_eepromAdress_LF = 0; // eeprom adress for calibration value load cell LF (4 bytes)
const int calVal_eepromAdress_RF = 4; // eeprom adress for calibration value load cell RF (4 bytes)
const int calVal_eepromAdress_LR = 8; // eeprom adress for calibration value load cell LR (4 bytes)
const int calVal_eepromAdress_RR = 12; // eeprom adress for calibration value load cell RR (4 bytes)
unsigned long t = 0;
void setup() {
Serial.begin(115200);
delay(2000);
Serial.println();
Serial.println("Starting...");
float calibrationValue_LF; // calibration value load cell LF
float calibrationValue_RF; // calibration value load cell RF
float calibrationValue_LR; // calibration value load cell LR
float calibrationValue_RR; // calibration value load cell RR
calibrationValue_LF = 399.16; // uncomment this if you want to set this value in the sketch
calibrationValue_RF = 385.84; // uncomment this if you want to set this value in the sketch
calibrationValue_LR = 349.70; // uncomment this if you want to set this value in the sketch
calibrationValue_RR = 396.19; // uncomment this if you want to set this value in the sketch
#if defined(ESP8266) || defined(ESP32)
//EEPROM.begin(512); // uncomment this if you use ESP8266 and want to fetch the value from eeprom
#endif
//EEPROM.get(calVal_eepromAdress_LF, calibrationValue_LF); // uncomment this if you want to fetch the value from eeprom
//EEPROM.get(calVal_eepromAdress_RF, calibrationValue_RF); // uncomment this if you want to fetch the value from eeprom
//EEPROM.get(calVal_eepromAdress_LR, calibrationValue_LR); // uncomment this if you want to fetch the value from eeprom
//EEPROM.get(calVal_eepromAdress_RR, calibrationValue_RR); // uncomment this if you want to fetch the value from eeprom
LoadCell_LF.begin();
LoadCell_RF.begin();
LoadCell_LR.begin();
LoadCell_RR.begin();
unsigned long stabilizingtime = 5000; // tare preciscion can be improved by adding a few seconds of stabilizing time
boolean _tare = true; //set this to false if you don't want tare to be performed in the next step
byte loadcell_LF_rdy = 0;
byte loadcell_RF_rdy = 0;
byte loadcell_LR_rdy = 0;
byte loadcell_RR_rdy = 0;
while ((loadcell_LF_rdy + loadcell_RF_rdy + loadcell_LR_rdy + loadcell_RR_rdy) < 2) { //run startup, stabilization and tare, both modules simultaniously
if (!loadcell_LF_rdy) loadcell_LF_rdy = LoadCell_LF.startMultiple(stabilizingtime, _tare);
if (!loadcell_RF_rdy) loadcell_RF_rdy = LoadCell_RF.startMultiple(stabilizingtime, _tare);
if (!loadcell_LR_rdy) loadcell_LR_rdy = LoadCell_LR.startMultiple(stabilizingtime, _tare);
if (!loadcell_RR_rdy) loadcell_RR_rdy = LoadCell_RR.startMultiple(stabilizingtime, _tare);
}
if (LoadCell_LF.getTareTimeoutFlag()) {
Serial.println("Timeout, check MCU>HX711 no.LF wiring and pin designations");
}
if (LoadCell_RF.getTareTimeoutFlag()) {
Serial.println("Timeout, check MCU>HX711 no.RF wiring and pin designations");
}
if (LoadCell_LR.getTareTimeoutFlag()) {
Serial.println("Timeout, check MCU>HX711 no.LR wiring and pin designations");
}
if (LoadCell_RR.getTareTimeoutFlag()) {
Serial.println("Timeout, check MCU>HX711 no.RR wiring and pin designations");
}
LoadCell_LF.setCalFactor(calibrationValue_LF); // user set calibration value (float)
LoadCell_RF.setCalFactor(calibrationValue_RF); // user set calibration value (float)
LoadCell_LR.setCalFactor(calibrationValue_LR); // user set calibration value (float)
LoadCell_RR.setCalFactor(calibrationValue_RR); // user set calibration value (float)
Serial.println("Startup is complete");
}
void loop() {
static boolean newDataReady = 0;
const int serialPrintInterval = 2000; //increase value to slow down serial print activity
// check for new data/start next conversion:
if (LoadCell_LF.update()) newDataReady = true;
LoadCell_RF.update();
LoadCell_LR.update();
LoadCell_RR.update();
LoadCell_LF.update();
if (LoadCell_RF.update()) newDataReady = true;
LoadCell_LR.update();
LoadCell_RR.update();
LoadCell_LF.update();
LoadCell_RF.update();
if (LoadCell_LR.update()) newDataReady = true;
LoadCell_RR.update();
LoadCell_LF.update();
LoadCell_RF.update();
LoadCell_LR.update();
if (LoadCell_RR.update()) newDataReady = true;
//get smoothed value from data set
if ((newDataReady)) {
if (millis() > t + serialPrintInterval) {
float LF = LoadCell_LF.getData(); // Left Front Tire Weight
float RF = LoadCell_RF.getData(); // Right Front Tire Weight
float LR = LoadCell_LR.getData(); // Left Rear Tire Weight
float RR = LoadCell_RR.getData(); // Right Rear Tire Weight
S1 = S2 + S3 + S4 + S5; // Total Weight
S2 = LF / 1000; // Left Front Tire Weight
S3 = RF / 1000; // Right Front Tire Weight
S4 = LR / 1000; // Left Rear Tire Weight
S5 = RR / 1000; // Right Rear Tire Weight
S6 = S2 + S3; // Total Front Weight
S7 = S6 / S1; // Total Front Rate
S8 = S4 + S5; // Total Rear Weight
S9 = S8 / S1; // Total Rear Rate
S10 = S2 + S4; // Left Side Total Weight
S11 = S10 / S1; // Left Side Total Rate
S12 = S3 + S5; // Right Side Total Weight
S13 = S12 / S1; // Right Side Total Rate
S14 = S3 + S4; // RF x LR Cross Weight (Wedge)
S15 = S14 / S1; // RF x LR Cross Rate
S16 = S14 - S17; // RF x LR Pounds
S17 = S2 + S5; // LF x RR Cross Weight
S18 = S17 / S1; // LF x RR Cross Rate
S19 = S17 - S14; // LF x RR Pounds
S20 = S10 * S6; // LF Target Tire Weight
S21 = S20 - S2; // LF Weight Bias
S22 = S12 * S6; // RF Target Tire Weight
S23 = S22 - S3; // RF Weight Bias
S24 = S10 * S8; // LR Target Tire Weight
S25 = S24 - S4; // LR Weight Bias
S26 = S12 * S8; // RR Target Tire Weight
S27 = S26 - S5; // RR Weight Bias
S28 = S4 - S5; // Bite
S29 = S24 - S26; // Bite Target
Serial.println("...");
Serial.print("Total Weight: ");
Serial.print(S1);
Serial.println("kg");
Serial.print("Left Front Tire Weight: ");
Serial.print(S2);
Serial.println("kg");
Serial.print("Right Front Tire Weight: ");
Serial.print(S3);
Serial.println("kg");
Serial.print("Left Rear Tire Weight: ");
Serial.print(S4);
Serial.println("kg");
Serial.print("Right Rear Tire Weight: ");
Serial.print(S5);
Serial.println("kg");
Serial.print("Bite: ");
Serial.print(S28);
Serial.println("kg");
Serial.println("...");
Serial.print("Total Front Weight: ");
Serial.print(S6);
Serial.println("kg");
Serial.print("Total Front Rate: ");
Serial.print(S7);
Serial.println("%");
Serial.print("Total Rear Weight: ");
Serial.print(S8);
Serial.println("kg");
Serial.print("Total Rear Rate: ");
Serial.print(S9);
Serial.println("%");
Serial.print("Left Side Total Weight: ");
Serial.print(S10);
Serial.println("kg");
Serial.print("Left Side Total Rate: ");
Serial.print(S11);
Serial.println("%");
Serial.print("Right Side Total Weight: ");
Serial.print(S12);
Serial.println("kg");
Serial.print("Right Side Total Rate: ");
Serial.print(S13);
Serial.println("%");
Serial.println("...");
Serial.print("RF + LR Cross Weight (Wedge): ");
Serial.print(S14);
Serial.println("kg");
Serial.print("RF + LR Cross Rate: ");
Serial.print(S15);
Serial.println("%");
Serial.print("RF + LR Pounds Over/Under: ");
Serial.print(S16);
Serial.println("kg");
Serial.print("LF + RR Cross Weight: ");
Serial.print(S17);
Serial.println("kg");
Serial.print("LF + RR Cross Rate: ");
Serial.print(S18);
Serial.println("%");
Serial.print("LF + RR Pounds Over/Under: ");
Serial.print(S19);
Serial.println("kg");
Serial.println("...");
Serial.print("Left Front Tire Target Weight: ");
Serial.print(S20);
Serial.println("kg");
Serial.print("LF Weight Bias: ");
Serial.print(S21);
Serial.println("kg");
Serial.print("Right Front Tire Target Weight: ");
Serial.print(S22);
Serial.println("kg");
Serial.print("RF Weight Bias: ");
Serial.print(S23);
Serial.println("kg");
Serial.print("Left Rear Tire Target Weight: ");
Serial.print(S24);
Serial.println("kg");
Serial.print("LR Weight Bias: ");
Serial.print(S25);
Serial.println("kg");
Serial.print("Right Rear Tire Target Weight: ");
Serial.print(S26);
Serial.println("kg");
Serial.print("RR Weight Bias: ");
Serial.print(S27);
Serial.println("kg");
Serial.print("Bite: ");
Serial.print(S29);
Serial.println("kg");
newDataReady = 0;
t = millis();
}
}
// receive command from serial terminal, send 't' to initiate tare operation:
if (Serial.available() > 0) {
char inByte = Serial.read();
if (inByte == 't') {
LoadCell_LF.tareNoDelay();
LoadCell_RF.tareNoDelay();
LoadCell_LR.tareNoDelay();
LoadCell_RR.tareNoDelay();
}
}
//check if last tare operation is complete
if (LoadCell_LF.getTareStatus() == true) {
Serial.println("Tare load cell LF complete");
}
if (LoadCell_RF.getTareStatus() == true) {
Serial.println("Tare load cell RF complete");
}
if (LoadCell_LR.getTareStatus() == true) {
Serial.println("Tare load cell LR complete");
}
if (LoadCell_RR.getTareStatus() == true) {
Serial.println("Tare load cell RR complete");
}
}
I get an error when I want to send information to virtual pins using the codes below. I did not understand what the problem was. It gives an error when I send information with floats. If I send a constant value instead of float I can read it from the application (e.g. 1000)
#define BLYNK_TEMPLATE_ID "XXX"
#define BLYNK_DEVICE_NAME "XXX"
#define BLYNK_AUTH_TOKEN "XXX"
#define BLYNK_PRINT Serial
#include <ESP8266WiFi.h>
#include <BlynkSimpleEsp8266.h>
char auth[] = BLYNK_AUTH_TOKEN;
char ssid[] = "XXX";
char pass[] = "XXX";
BlynkTimer timer;
#include <HX711_ADC.h>
#if defined(ESP8266)|| defined(ESP32) || defined(AVR)
#include <EEPROM.h>
#endif
//pins:
const int HX711_dout_LF = 12; //mcu > LF dout pin
const int HX711_sck_LF = 14; //mcu > LF sck pin
const int HX711_dout_RF = 4; //mcu > RF dout pin
const int HX711_sck_RF = 0; //mcu > RF sck pin
const int HX711_dout_LR = 13; //mcu > LR dout pin
const int HX711_sck_LR = 15; //mcu > LR sck pin
const int HX711_dout_RR = 5; //mcu > RR dout pin
const int HX711_sck_RR = 16; //mcu > RR sck pin
//HX711 constructor (dout pin, sck pin)
HX711_ADC LoadCell_LF(HX711_dout_LF, HX711_sck_LF); //Left Front
HX711_ADC LoadCell_RF(HX711_dout_RF, HX711_sck_RF); //Right Front
HX711_ADC LoadCell_LR(HX711_dout_LR, HX711_sck_LR); //Left Rear
HX711_ADC LoadCell_RR(HX711_dout_RR, HX711_sck_RR); //Right Rear
const int calVal_eepromAdress_LF = 0; // eeprom adress for calibration value load cell LF (4 bytes)
const int calVal_eepromAdress_RF = 4; // eeprom adress for calibration value load cell RF (4 bytes)
const int calVal_eepromAdress_LR = 8; // eeprom adress for calibration value load cell LR (4 bytes)
const int calVal_eepromAdress_RR = 12; // eeprom adress for calibration value load cell RR (4 bytes)
unsigned long t = 0;
void setup() {
Serial.begin(115200);
Blynk.begin(auth, ssid, pass);
delay(2000);
Serial.println();
Serial.println("Starting...");
float calibrationValue_LF; // calibration value load cell LF
float calibrationValue_RF; // calibration value load cell RF
float calibrationValue_LR; // calibration value load cell LR
float calibrationValue_RR; // calibration value load cell RR
calibrationValue_LF = 399.16; // uncomment this if you want to set this value in the sketch
calibrationValue_RF = 385.84; // uncomment this if you want to set this value in the sketch
calibrationValue_LR = 349.70; // uncomment this if you want to set this value in the sketch
calibrationValue_RR = 396.19; // uncomment this if you want to set this value in the sketch
#if defined(ESP8266) || defined(ESP32)
//EEPROM.begin(512); // uncomment this if you use ESP8266 and want to fetch the value from eeprom
#endif
//EEPROM.get(calVal_eepromAdress_LF, calibrationValue_LF); // uncomment this if you want to fetch the value from eeprom
//EEPROM.get(calVal_eepromAdress_RF, calibrationValue_RF); // uncomment this if you want to fetch the value from eeprom
//EEPROM.get(calVal_eepromAdress_LR, calibrationValue_LR); // uncomment this if you want to fetch the value from eeprom
//EEPROM.get(calVal_eepromAdress_RR, calibrationValue_RR); // uncomment this if you want to fetch the value from eeprom
LoadCell_LF.begin();
LoadCell_RF.begin();
LoadCell_LR.begin();
LoadCell_RR.begin();
unsigned long stabilizingtime = 5000; // tare preciscion can be improved by adding a few seconds of stabilizing time
boolean _tare = true; //set this to false if you don't want tare to be performed in the next step
byte loadcell_LF_rdy = 0;
byte loadcell_RF_rdy = 0;
byte loadcell_LR_rdy = 0;
byte loadcell_RR_rdy = 0;
while ((loadcell_LF_rdy + loadcell_RF_rdy + loadcell_LR_rdy + loadcell_RR_rdy) < 2) { //run startup, stabilization and tare, both modules simultaniously
if (!loadcell_LF_rdy) loadcell_LF_rdy = LoadCell_LF.startMultiple(stabilizingtime, _tare);
if (!loadcell_RF_rdy) loadcell_RF_rdy = LoadCell_RF.startMultiple(stabilizingtime, _tare);
if (!loadcell_LR_rdy) loadcell_LR_rdy = LoadCell_LR.startMultiple(stabilizingtime, _tare);
if (!loadcell_RR_rdy) loadcell_RR_rdy = LoadCell_RR.startMultiple(stabilizingtime, _tare);
}
if (LoadCell_LF.getTareTimeoutFlag()) {
Serial.println("Timeout, check MCU>HX711 no.LF wiring and pin designations");
}
if (LoadCell_RF.getTareTimeoutFlag()) {
Serial.println("Timeout, check MCU>HX711 no.RF wiring and pin designations");
}
if (LoadCell_LR.getTareTimeoutFlag()) {
Serial.println("Timeout, check MCU>HX711 no.LR wiring and pin designations");
}
if (LoadCell_RR.getTareTimeoutFlag()) {
Serial.println("Timeout, check MCU>HX711 no.RR wiring and pin designations");
}
LoadCell_LF.setCalFactor(calibrationValue_LF); // user set calibration value (float)
LoadCell_RF.setCalFactor(calibrationValue_RF); // user set calibration value (float)
LoadCell_LR.setCalFactor(calibrationValue_LR); // user set calibration value (float)
LoadCell_RR.setCalFactor(calibrationValue_RR); // user set calibration value (float)
Serial.println("Startup is complete");
}
void loop() {
Blynk.run();
timer.run(); // Initiates BlynkTimer
Blynk.virtualWrite(V1, S1);
Blynk.virtualWrite(V2, S2);
Blynk.virtualWrite(V3, S3);
Blynk.virtualWrite(V4, S4);
Blynk.virtualWrite(V5, S5);
Blynk.virtualWrite(V6, S6);
Blynk.virtualWrite(V7, S7);
Blynk.virtualWrite(V8, S8);
Blynk.virtualWrite(V9, S9);
Blynk.virtualWrite(V10, S10);
Blynk.virtualWrite(V11, S11);
Blynk.virtualWrite(V12, S12);
Blynk.virtualWrite(V13, S13);
Blynk.virtualWrite(V14, S14);
Blynk.virtualWrite(V15, S15);
Blynk.virtualWrite(V16, S16);
Blynk.virtualWrite(V17, S17);
Blynk.virtualWrite(V18, S18);
Blynk.virtualWrite(V19, S19);
Blynk.virtualWrite(V20, S20);
Blynk.virtualWrite(V21, S21);
Blynk.virtualWrite(V22, S22);
Blynk.virtualWrite(V23, S23);
Blynk.virtualWrite(V24, S24);
Blynk.virtualWrite(V25, S25);
Blynk.virtualWrite(V26, S26);
Blynk.virtualWrite(V27, S27);
Blynk.virtualWrite(V28, S28);
Blynk.virtualWrite(V29, S29);
static boolean newDataReady = 0;
const int serialPrintInterval = 2000; //increase value to slow down serial print activity
// check for new data/start next conversion:
if (LoadCell_LF.update()) newDataReady = true;
LoadCell_RF.update();
LoadCell_LR.update();
LoadCell_RR.update();
LoadCell_LF.update();
if (LoadCell_RF.update()) newDataReady = true;
LoadCell_LR.update();
LoadCell_RR.update();
LoadCell_LF.update();
LoadCell_RF.update();
if (LoadCell_LR.update()) newDataReady = true;
LoadCell_RR.update();
LoadCell_LF.update();
LoadCell_RF.update();
LoadCell_LR.update();
if (LoadCell_RR.update()) newDataReady = true;
//get smoothed value from data set
if ((newDataReady)) {
if (millis() > t + serialPrintInterval) {
float LF = LoadCell_LF.getData(); // Left Front Tire Weight
float RF = LoadCell_RF.getData(); // Right Front Tire Weight
float LR = LoadCell_LR.getData(); // Left Rear Tire Weight
float RR = LoadCell_RR.getData(); // Right Rear Tire Weight
S1 = S2 + S3 + S4 + S5; // Total Weight
S2 = LF / 1000; // Left Front Tire Weight
S3 = RF / 1000; // Right Front Tire Weight
S4 = LR / 1000; // Left Rear Tire Weight
S5 = RR / 1000; // Right Rear Tire Weight
S6 = S2 + S3; // Total Front Weight
S7 = S6 / S1; // Total Front Rate
S8 = S4 + S5; // Total Rear Weight
S9 = S8 / S1; // Total Rear Rate
S10 = S2 + S4; // Left Side Total Weight
S11 = S10 / S1; // Left Side Total Rate
S12 = S3 + S5; // Right Side Total Weight
S13 = S12 / S1; // Right Side Total Rate
S14 = S3 + S4; // RF x LR Cross Weight (Wedge)
S15 = S14 / S1; // RF x LR Cross Rate
S16 = S14 - S17; // RF x LR Pounds
S17 = S2 + S5; // LF x RR Cross Weight
S18 = S17 / S1; // LF x RR Cross Rate
S19 = S17 - S14; // LF x RR Pounds
S20 = S10 * S6; // LF Target Tire Weight
S21 = S20 - S2; // LF Weight Bias
S22 = S12 * S6; // RF Target Tire Weight
S23 = S22 - S3; // RF Weight Bias
S24 = S10 * S8; // LR Target Tire Weight
S25 = S24 - S4; // LR Weight Bias
S26 = S12 * S8; // RR Target Tire Weight
S27 = S26 - S5; // RR Weight Bias
S28 = S4 - S5; // Bite
S29 = S24 - S26; // Bite Target
newDataReady = 0;
t = millis();
}
}
// receive command from serial terminal, send 't' to initiate tare operation:
if (Serial.available() > 0) {
char inByte = Serial.read();
if (inByte == 't') {
LoadCell_LF.tareNoDelay();
LoadCell_RF.tareNoDelay();
LoadCell_LR.tareNoDelay();
LoadCell_RR.tareNoDelay();
}
}
//check if last tare operation is complete
if (LoadCell_LF.getTareStatus() == true) {
Serial.println("Tare load cell LF complete");
}
if (LoadCell_RF.getTareStatus() == true) {
Serial.println("Tare load cell RF complete");
}
if (LoadCell_LR.getTareStatus() == true) {
Serial.println("Tare load cell LR complete");
}
if (LoadCell_RR.getTareStatus() == true) {
Serial.println("Tare load cell RR complete");
}
}
Arduino:1.8.16 (Windows 10), Kart:“NodeMCU 1.0 (ESP-12E Module), 80 MHz, Flash, Disabled (new aborts on oom), Disabled, All SSL ciphers (most compatible), 32KB cache + 32KB IRAM (balanced), Use pgm_read macros for IRAM/PROGMEM, 4MB (FS:2MB OTA:~1019KB), 2, v2 Lower Memory, Disabled, None, Only Sketch, 115200”
C:\Users\XPS\Documents\Arduino\Read_4x_load_cell_v6\Read_4x_load_cell_v6.ino: In function ‘void loop()’:
Read_4x_load_cell_v6:111:28: error: ‘S1’ was not declared in this scope; did you mean ‘SS’?
111 | Blynk.virtualWrite(V1, S1);
| ^~
| SS
Read_4x_load_cell_v6:112:28: error: ‘S2’ was not declared in this scope; did you mean ‘SS’?
112 | Blynk.virtualWrite(V2, S2);
| ^~
| SS
Read_4x_load_cell_v6:113:28: error: ‘S3’ was not declared in this scope; did you mean ‘SS’?
113 | Blynk.virtualWrite(V3, S3);
| ^~
| SS
Read_4x_load_cell_v6:114:28: error: ‘S4’ was not declared in this scope; did you mean ‘SS’?
114 | Blynk.virtualWrite(V4, S4);
| ^~
| SS
Read_4x_load_cell_v6:115:28: error: ‘S5’ was not declared in this scope; did you mean ‘SS’?
115 | Blynk.virtualWrite(V5, S5);
| ^~
| SS
Read_4x_load_cell_v6:116:28: error: ‘S6’ was not declared in this scope; did you mean ‘SS’?
116 | Blynk.virtualWrite(V6, S6);
| ^~
| SS
Read_4x_load_cell_v6:117:28: error: ‘S7’ was not declared in this scope; did you mean ‘SS’?
117 | Blynk.virtualWrite(V7, S7);
| ^~
| SS
Read_4x_load_cell_v6:118:28: error: ‘S8’ was not declared in this scope; did you mean ‘SS’?
118 | Blynk.virtualWrite(V8, S8);
| ^~
| SS
Read_4x_load_cell_v6:119:28: error: ‘S9’ was not declared in this scope; did you mean ‘SS’?
119 | Blynk.virtualWrite(V9, S9);
| ^~
| SS
Read_4x_load_cell_v6:120:29: error: ‘S10’ was not declared in this scope; did you mean ‘D10’?
120 | Blynk.virtualWrite(V10, S10);
| ^~~
| D10
Read_4x_load_cell_v6:121:29: error: ‘S11’ was not declared in this scope; did you mean ‘V11’?
121 | Blynk.virtualWrite(V11, S11);
| ^~~
| V11
Read_4x_load_cell_v6:122:29: error: ‘S12’ was not declared in this scope; did you mean ‘V12’?
122 | Blynk.virtualWrite(V12, S12);
| ^~~
| V12
Read_4x_load_cell_v6:123:29: error: ‘S13’ was not declared in this scope; did you mean ‘V13’?
123 | Blynk.virtualWrite(V13, S13);
| ^~~
| V13
Read_4x_load_cell_v6:124:29: error: ‘S14’ was not declared in this scope; did you mean ‘V14’?
124 | Blynk.virtualWrite(V14, S14);
| ^~~
| V14
Read_4x_load_cell_v6:125:29: error: ‘S15’ was not declared in this scope; did you mean ‘V15’?
125 | Blynk.virtualWrite(V15, S15);
| ^~~
| V15
Read_4x_load_cell_v6:126:29: error: ‘S16’ was not declared in this scope; did you mean ‘s16’?
126 | Blynk.virtualWrite(V16, S16);
| ^~~
| s16
Read_4x_load_cell_v6:127:29: error: ‘S17’ was not declared in this scope; did you mean ‘V17’?
127 | Blynk.virtualWrite(V17, S17);
| ^~~
| V17
Read_4x_load_cell_v6:128:29: error: ‘S18’ was not declared in this scope; did you mean ‘V18’?
128 | Blynk.virtualWrite(V18, S18);
| ^~~
| V18
Read_4x_load_cell_v6:129:29: error: ‘S19’ was not declared in this scope; did you mean ‘V19’?
129 | Blynk.virtualWrite(V19, S19);
| ^~~
| V19
Read_4x_load_cell_v6:130:29: error: ‘S20’ was not declared in this scope; did you mean ‘V20’?
130 | Blynk.virtualWrite(V20, S20);
| ^~~
| V20
Read_4x_load_cell_v6:131:29: error: ‘S21’ was not declared in this scope; did you mean ‘V21’?
131 | Blynk.virtualWrite(V21, S21);
| ^~~
| V21
Read_4x_load_cell_v6:132:29: error: ‘S22’ was not declared in this scope; did you mean ‘V22’?
132 | Blynk.virtualWrite(V22, S22);
| ^~~
| V22
Read_4x_load_cell_v6:133:29: error: ‘S23’ was not declared in this scope; did you mean ‘V23’?
133 | Blynk.virtualWrite(V23, S23);
| ^~~
| V23
Read_4x_load_cell_v6:134:29: error: ‘S24’ was not declared in this scope; did you mean ‘V24’?
134 | Blynk.virtualWrite(V24, S24);
| ^~~
| V24
Read_4x_load_cell_v6:135:29: error: ‘S25’ was not declared in this scope; did you mean ‘V25’?
135 | Blynk.virtualWrite(V25, S25);
| ^~~
| V25
Read_4x_load_cell_v6:136:29: error: ‘S26’ was not declared in this scope; did you mean ‘V26’?
136 | Blynk.virtualWrite(V26, S26);
| ^~~
| V26
Read_4x_load_cell_v6:137:29: error: ‘S27’ was not declared in this scope; did you mean ‘V27’?
137 | Blynk.virtualWrite(V27, S27);
| ^~~
| V27
Read_4x_load_cell_v6:138:29: error: ‘S28’ was not declared in this scope; did you mean ‘V28’?
138 | Blynk.virtualWrite(V28, S28);
| ^~~
| V28
Read_4x_load_cell_v6:139:29: error: ‘S29’ was not declared in this scope; did you mean ‘V29’?
139 | Blynk.virtualWrite(V29, S29);
| ^~~
| V29
exit status 1
‘S1’ was not declared in this scope; did you mean ‘SS’?
can you help me with this?