#include <ESP8266WiFi.h>
#include <BlynkSimpleEsp8266.h>
#define RightMotorSpeed 4
#define RightMotorDir 0
#define LeftMotorSpeed 5
#define LeftMotorDir 2
char auth[] = "blynktoken";
char ssid[] = "ssid";
char pass[] = "password";
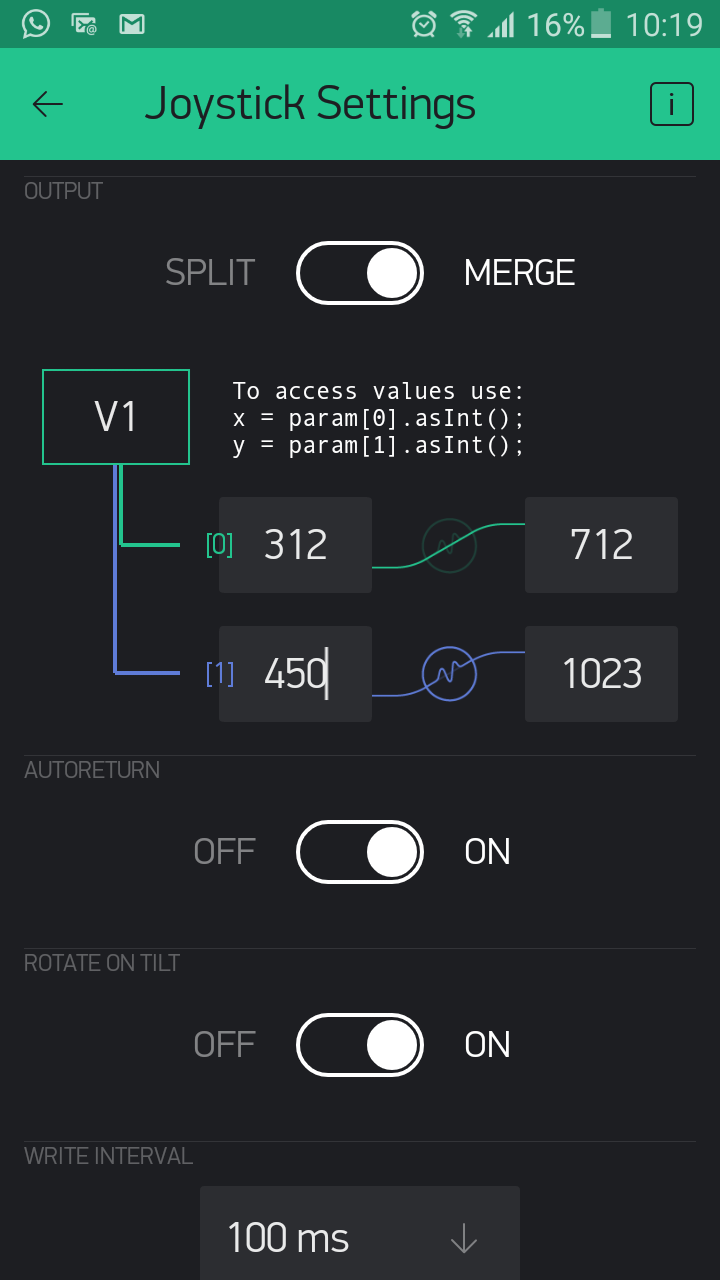
int minRange = 312;
int maxRange = 712;
int minSpeed = 450;
int maxSpeed = 1023;
int noSpeed = 0;
void moveControl(int x, int y)
{
if(y >= maxRange && x >= minRange && x <= maxRange) //zataci R
{
digitalWrite(RightMotorDir,HIGH);
digitalWrite(LeftMotorDir,HIGH);
analogWrite(RightMotorSpeed,maxSpeed);
analogWrite(LeftMotorSpeed,maxSpeed);
}
// move forward right
else if(x >= maxRange && y >= maxRange) //zataci R
{
digitalWrite(RightMotorDir,HIGH);
digitalWrite(LeftMotorDir,HIGH);
analogWrite(RightMotorSpeed,minSpeed);
analogWrite(LeftMotorSpeed,maxSpeed);
}
// move forward left
else if(x <= minRange && y >= maxRange)
{
digitalWrite(RightMotorDir,HIGH);
digitalWrite(LeftMotorDir,HIGH);
analogWrite(RightMotorSpeed,maxSpeed);
analogWrite(LeftMotorSpeed,minSpeed);
}
// neutral zone
else if(y < maxRange && y > minRange && x < maxRange && x > minRange)
{
analogWrite(RightMotorSpeed,noSpeed);
analogWrite(LeftMotorSpeed,noSpeed);
}
// move back
else if(y <= minRange && x >= minRange && x <= maxRange)
{
digitalWrite(RightMotorDir,LOW);
digitalWrite(LeftMotorDir,LOW);
analogWrite(RightMotorSpeed,maxSpeed);
analogWrite(LeftMotorSpeed,maxSpeed);
}
// move back and right
else if(y <= minRange && x <= minRange)
{
digitalWrite(RightMotorDir,LOW);
digitalWrite(LeftMotorDir,LOW);
analogWrite(RightMotorSpeed,minSpeed);
analogWrite(LeftMotorSpeed,maxSpeed);
}
// move back and left
else if(y <= minRange && x >= maxRange)
{
digitalWrite(RightMotorDir,LOW);
digitalWrite(LeftMotorDir,LOW);
analogWrite(RightMotorSpeed,maxSpeed);
analogWrite(LeftMotorSpeed,minSpeed);
}
}
void setup()
{
// initial settings for motors off and direction forward
pinMode(RightMotorSpeed, OUTPUT);
pinMode(LeftMotorSpeed, OUTPUT);
pinMode(RightMotorDir, OUTPUT);
pinMode(LeftMotorDir, OUTPUT);
digitalWrite(RightMotorSpeed, LOW);
digitalWrite(LeftMotorSpeed, LOW);
digitalWrite(RightMotorDir, HIGH);
digitalWrite(LeftMotorDir,HIGH);
Blynk.begin(auth, ssid, pass);
}
void loop()
{
Blynk.run();
}
BLYNK_WRITE(V1)
{
int x = param[0].asInt();
int y = param[1].asInt();
moveControl(x,y);
}
Hi guys.
That is what I did. But is these values in blynk app are correct?
Caz tha car motors not working properly.
The code is correct. I just wanna know how to add values in joystik.
Thanks