Hello everyone,
I am new into Blynk and Arduino Uno
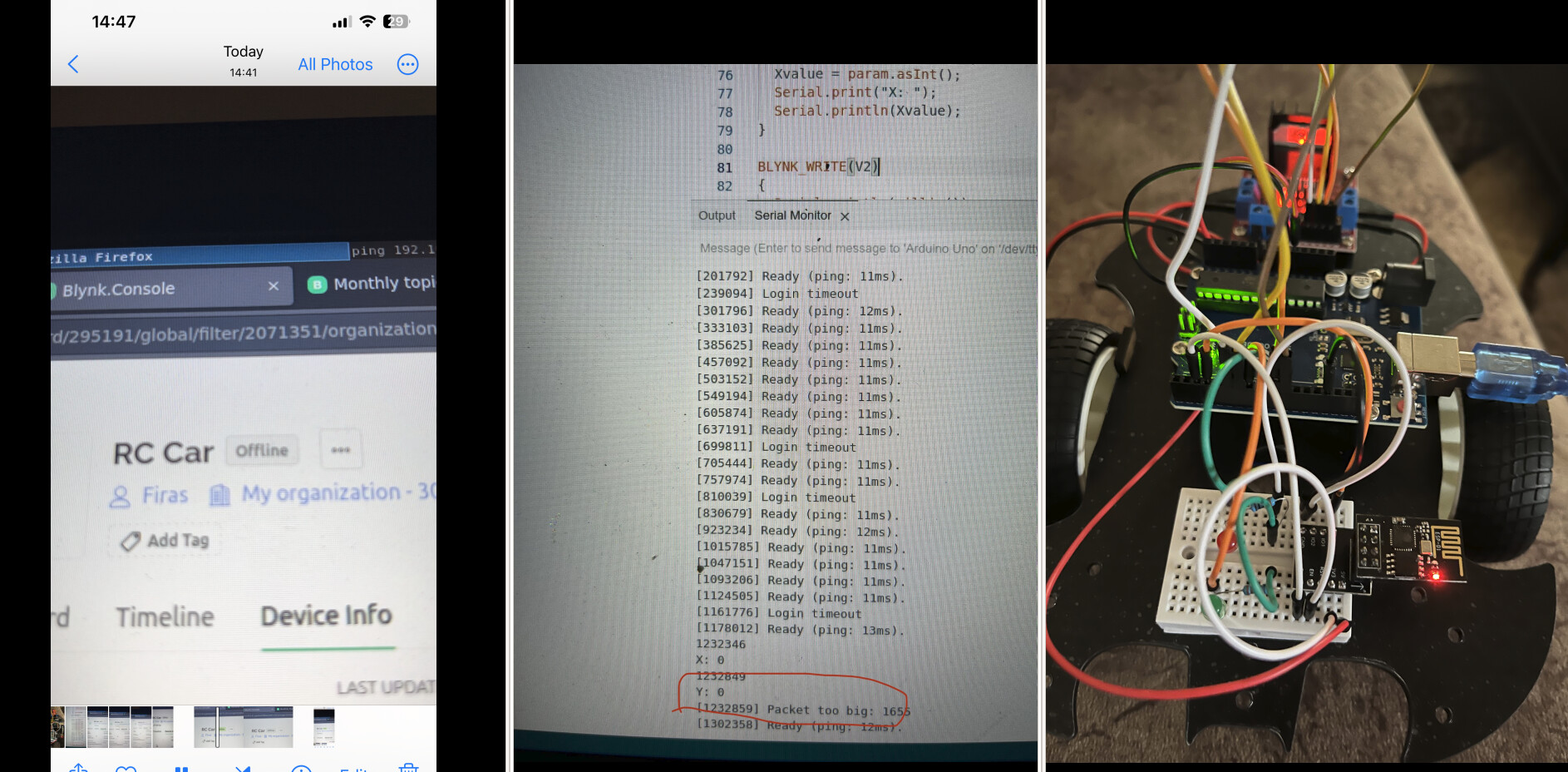
I have a problem somewhere, maybe in my device, or it Blynk console as it keeps switching offline every few sec.
I don’t know what is the problem exactly.
Below is some info, that may help:
- sketch
// Comment this out to disable prints and save space
#define BLYNK_PRINT Serial
#include "credentials.h"
#include <ESP8266_Lib.h>
#include <BlynkSimpleShieldEsp8266.h>
char auth[] = BLYNK_AUTH_TOKEN;
// or Software Serial on Uno, Nano...
#include <SoftwareSerial.h>
SoftwareSerial EspSerial(2, 3); // RX, TX
// Your ESP8266 baud rate:
#define ESP8266_BAUD 115200
ESP8266 wifi(&EspSerial);
const int redLedPin = 7;
const int greenConnectionPin = 8; // The LED on this pin will turn on the the car is connected to Blynk
/*car init*/
const int in1 = 5; // in1,2 for right wheel
const int in2 = 6;
const int in3 = 9; // in3,4 for left wheel
const int in4 = 10;
void moveBackward(int speed) {
analogWrite(in1, 0);
analogWrite(in2, speed);
analogWrite(in3, speed);
analogWrite(in4, 0);
}
void moveForward(int speed) {
analogWrite(in1, speed);
analogWrite(in2, 0);
analogWrite(in3, 0);
analogWrite(in4, speed);
}
void turnLeft(int speed) {
analogWrite(in1, speed);
analogWrite(in2, 0);
analogWrite(in3, speed);
analogWrite(in4, 0);
}
void turnRight(int speed) {
analogWrite(in1, 0);
analogWrite(in2, speed);
analogWrite(in3, 0);
analogWrite(in4, speed);
}
void stopMove() {
analogWrite(in1, 0);
analogWrite(in2, 0);
analogWrite(in3, 0);
analogWrite(in4, 0);
}
BLYNK_WRITE(V0)
{
int pinValue = param.asInt(); // assigning incoming value from pin V0 to a variable
digitalWrite(redLedPin,pinValue);
}
int Xvalue = 0;
int Yvalue = 0;
BLYNK_WRITE(V1)
{
Serial.println(millis());
Xvalue = param.asInt();
Serial.print("X: ");
Serial.println(Xvalue);
}
BLYNK_WRITE(V2)
{
Serial.println(millis());
Yvalue = param.asInt();
Serial.print("Y: ");
Serial.println(Yvalue);
}
void setup()
{
// Debug console
Serial.begin(115200);
// Set ESP8266 baud rate
EspSerial.begin(ESP8266_BAUD);
delay(10);
Blynk.begin(auth, wifi, ssid, pass);
pinMode(redLedPin,OUTPUT);
pinMode(greenConnectionPin,OUTPUT);
digitalWrite(greenConnectionPin, LOW);
//motor
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
void loop()
{
Blynk.run();
if (!Blynk.connected()) {
digitalWrite(greenConnectionPin, LOW);
Serial.print("offline!");
bool result = Blynk.connect();
Serial.println(result);
} else {
digitalWrite(greenConnectionPin, HIGH);
}
if (Yvalue >= 5) { // Actually forward
moveForward(150);
} else if (Yvalue <= -5) { // Actually backward
moveBackward(150);
} else if (Xvalue >= 5) {
turnRight(255); // Actually a right turn
} else if (Xvalue <= -5) {
turnLeft(255); // Actually left turn
} else {
stopMove();
}
}
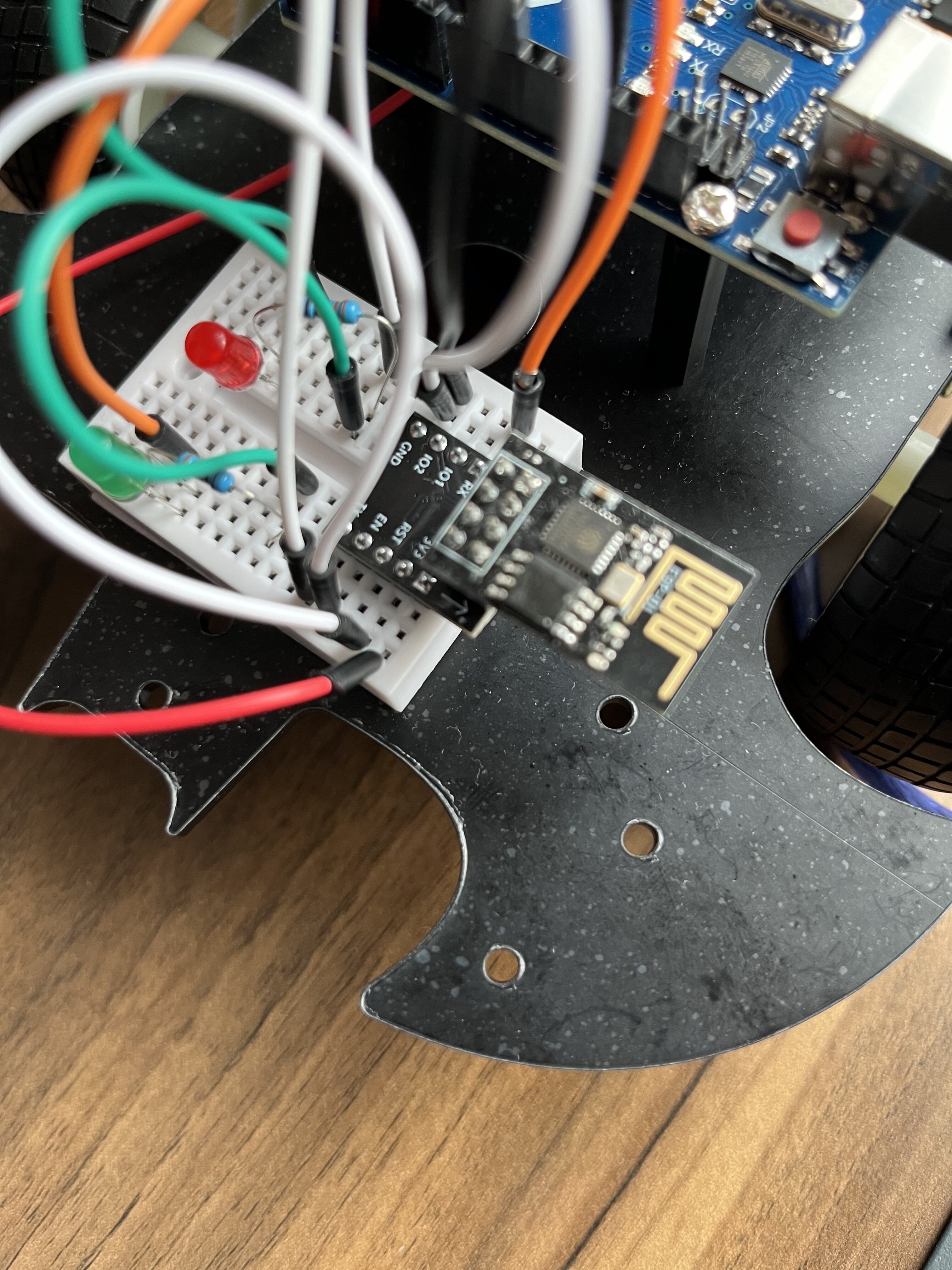
- Please have a look for the attached screenshots
Thanks for your help