As I have not been able to find documentation for how often Blynk.run should be called I have set up a small scheduler which sends one Blynk command every 100 ms till done (max 8 commands in total - 3 colors, 4 values, one Push )
Library installed in root of the ESP.
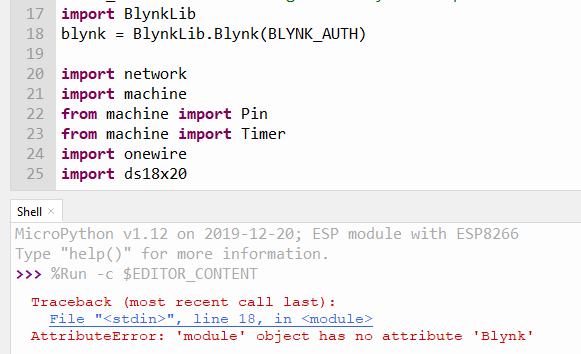
I am running this on a hacked Sonoff Basic using Vshymanskyy’s blynk-library-python from github.
BLYNK_AUTH = 'kTFRmx7VgEtXb2aEUMyAo....HqSsFG6'
import blynklib
blynk = blynklib.Blynk(BLYNK_AUTH)
import network
import machine
from machine import Pin
from machine import Timer
import onewire
import ds18x20
#import sys
import time
import ntptime
from machine import RTC
_DAYS_IN_MONTH = [None, 31, 28, 31, 30, 31, 30, 31, 31, 30, 31, 30, 31]
WIFI_SSID = 'xxxxxxxxxx'
WIFI_PASS = 'yyyyyyyyy'
BLYNK_GREEN = "#23C48E"
BLYNK_YELLOW = "#ED9D00"
BLYNK_RED = "#D3435C"
LED_HIGH = 255
#Virtual pins
V0 = 0
V1 = 1
V2 = 2
V3 = 3
Virtuals = (V0,V1,V2,V3,V0,V1,V2,V3) #the virtual pins are handles one by one from this list
SleepTime = 30*60*1000 # half an hour is max sleep time
tempLimit = -18 # maximum acceptable temperature in freezer
tempRange = 6 # range where temp is somewhat acceptable
msg = ""
col = 0
temp = -30
rtc = RTC()
# check if the device woke from a deep sleep
#if machine.reset_cause() == machine.DEEPSLEEP_RESET:
# print('woke from a deep sleep')
# set up the OneWire communication to the temperature sensor
ow = onewire.OneWire(Pin(14))
ds = ds18x20.DS18X20(ow)
#lcd.putstr("Trigger ds18x20\n")
roms = ds.scan()
f = open('checktime.txt')
flag = f.read()
f.close()
f = open('checktime.txt', 'w')
#Toggle the Flag
if flag == 'Wait':
f.write("Go ")
else:
f.write("Wait")
f.close()
print("flag " + flag)
if flag == 'Wait':
msgNo = 16 # this wil force a deepsleep as first job in scheduler
else:
msgNo = -1
print("Connecting to WiFi...")
wifi = network.WLAN(network.STA_IF)
wifi.active(True)
wifi.connect(WIFI_SSID, WIFI_PASS)
while not wifi.isconnected():
pass
print('IP:', wifi.ifconfig()[0])
#lcd.putstr(str(wifi.ifconfig()[0]) + "\n")
def setTime():
try:
ntptime.settime()
print('synced from server: ' + ntptime.host)
return True
except OSError:
print('Couldn\'t retrieve time')
return False
# synchronize with ntp
# need to be connected to wifi
if setTime():
pass
else:
time.sleep(10) # sleep for 10 sec before trying again
setTime()
t = rtc.datetime() # get the date and time in UTC
day = t[2]
month = t[1]
year = t[0]
hour = t[4]
minute = t[5]
#Adjust for one hour difference to UTC
if ((year % 4) == 0) and (month == 2): # leap year and month = february
extra = 1
else:
extra = 0
if hour == 23:
hour = 0
if day == _DAYS_IN_MONTH[month] + extra: # if leap year and month = februar, add one day
day = 1
if month == 12:
month = 1
year = year + 1
else:
month = month + 1
else:
day = day + 1
else:
hour = hour + 1
print(day,month,year,hour,minute)
def initiateTemp():
ds.convert_temp() # linitiate a reading
print("a Temp reading was Triggered")
def readTemp():
global msg
global col
global temp
for rom in roms: # now read the temperature
temp = ds.read_temp(rom)
msg = "Temp: {:+.1f}".format(temp)
for i in range(len(msg)+1,17):
msg = msg + " "
print(msg)
# Set the Blynk color based on temp
if temp <= tempLimit:
col = _GREEN
elif (temp > tempLimit) and (temp <= (tempLimit + tempRange)):
col = BLYNK_YELLOW
else:
col = BLYNK_RED
def wait(): #wait for temp reading to settle
pass
def notify():
print("notify")
if col == BLYNK_YELLOW:
blynk.notify("Dybfryser temperatur over -18 grader: {:.1f}".format(temp)) # Houston we have a problem!
elif col == BLYNK_RED:
blynk.notify("Dybfryser temperatur langt over -18 grader: {:.1f}".format(temp)) # Houston we have a huge problem!
def colors():
print("colors " + str(Virtuals[msgNo]))
blynk.set_property(Virtuals[msgNo],"color",col) # All graphs, LEDs and Gauges set to color "col"
def values():
print("values " + str(Virtuals[msgNo]))
blynk.virtual_write(Virtuals[msgNo],temp) # send data to the virtuals
def LED():
print("LED " + str(Virtuals[msgNo]))
blynk.virtual_write(Virtuals[msgNo],LED_HIGH) # send data to the LED (Intensity)
def deep_sleep(msecs):
# configure RTC.ALARM0 to be able to wake the device
rtc = machine.RTC()
rtc.irq(trigger=rtc.ALARM0, wake=machine.DEEPSLEEP)
# set RTC.ALARM0 to fire after X milliseconds (waking the device)
rtc.alarm(rtc.ALARM0, msecs)
# put the device to sleep
machine.deepsleep()
def gotosleep():
global msgNo
#lcd.clear
#lcd.putstr(" Sleeping ")
#lcd.putstr(msg)
print("See you later")
deep_sleep(SleepTime) # and then go to sleep again for 30 minutes
def translate2functions(argument):
print ("Dispather " + str(argument))
switcher = {
0: initiateTemp,
1: wait,
2: wait,
3: wait,
4: wait,
5: wait,
6: wait,
7: wait,
8: readTemp,
9: notify,
10: colors,
11: colors,
12: colors,
13: values,
14: values,
15: values,
16: LED,
17: gotosleep # end the show
}
# Get the function from switcher dictionary
func = switcher.get(argument)
# Execute the function on return!
return func()
def DoJobs():
global msgNo
msgNo = (msgNo + 1)
print("DoJobs " + str(msgNo))
translate2functions(msgNo)
#Start the scheduler:
tim0 = Timer(-1) # construct a virtual timer
tim0.init(period=100, mode=Timer.PERIODIC, callback=lambda t:DoJobs())
while true
blynk.run()