Hello Blynkers!
I need your advice.
Code is running very well through wifi when device is connected to USB cable,
but if I connect from power 5v to VIN, device is not responding well.
Especially Virtual buttons V3,V4,V5,V6.
What do thing is it promlem of code or scheme
#define BLYNK_FIRMWARE_VERSION "0.1.0"
#define BLYNK_PRINT Serial
//#define BLYNK_DEBUG
#define APP_DEBUG
// Uncomment your board, or configure a custom board in Settings.h
//#define USE_WROVER_BOARD
#include "BlynkEdgent.h"
#include <Robojax_L298N_DC_motor.h>
#include <ESP32Servo.h>
#include <HCSR04.h>
int ENA = 13;
int IN1 = 12;
int IN2 = 14;
int IN3 = 27;
int IN4 = 26;
int ENB = 25;
const byte triggerPin = 18;
const byte echoPin = 19;
UltraSonicDistanceSensor distanceSensor(triggerPin, echoPin);
int led1 = 2;
int led2 = 15;
int led3 = 22;
int led4 = 23;
int myServo = 5;
float distance;
int startDevice;
BLYNK_WRITE(V0) {
startDevice = param.asInt();
digitalWrite(led1, startDevice);
if (startDevice == 1) {
Serial.println("DEVICE ON");
}
else {
Serial.println("DEVICE OFF");
}
}
void hcsr04() {
// int pinValue=BLYNK_WRITE(V0); //START IF DEVICE is ON, GET VALUE FROM V0
if (startDevice == 1) {
float distance = distanceSensor.measureDistanceCm();
//Serial.println(distance);
Blynk.virtualWrite(V2, distance);
if (distance < 200) {
digitalWrite(led2, HIGH);
digitalWrite(led3, LOW);
digitalWrite(led4, LOW);
}
else {
digitalWrite(led3, HIGH);
digitalWrite(led4, HIGH);
digitalWrite(led2, LOW);
}
}
else {
Blynk.virtualWrite(V2, 0.00);
digitalWrite(led2, LOW);
digitalWrite(led3, LOW);
digitalWrite(led4, LOW);
}
}
BLYNK_WRITE(V3) {
if (startDevice == 1) {
int forwardButton = param.asInt();
if (forwardButton ==1)
{
goForward();
//open valve
}
else if (forwardButton ==0){
StopM();
}
}else {
StopM();
}
}
BLYNK_WRITE(V4) {
if (startDevice == 1) {
int backwardButton = param.asInt();
if (backwardButton ==1)
{
goBackward();
//open valve
}
else if (backwardButton ==0) {
StopM();
}
}else {
StopM();
}
}
BLYNK_WRITE(V5) {
if (startDevice == 1) {
int leftButton = param.asInt();
if (leftButton ==1)
{
turnLeft();
//open valve
}
else if (leftButton ==0) {
StopM();
}
}else {
StopM();
}
}
BLYNK_WRITE(V6) {
if (startDevice == 1) {
int rightButton = param.asInt();
if (rightButton ==1)
{
turnRight();
//open valve
}
else if (rightButton ==0) {
StopM();
}
}else {
StopM();
}
}
void goForward() //forward with speed val
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(ENA, 255);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
digitalWrite(ENB, 255);
Serial.println("Forward");
}
void goBackward() // secont function
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(ENA, 255);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
digitalWrite(ENB, 255);
Serial.println("Backward");
}
void turnRight() //forward with speed val
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(ENA, 255);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
digitalWrite(ENB, 255);
Serial.println("Right");
}
void turnLeft() // secont function
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(ENA, 255);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
digitalWrite(ENB, 255);
Serial.println("Left");
}
void StopM() //third function
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
Serial.println("Stoped");
}
BLYNK_CONNECTED()
{
Blynk.syncVirtual(V0);
Blynk.syncVirtual(V1);
Blynk.syncVirtual(V2);
Blynk.syncVirtual(V3);
Blynk.syncVirtual(V4);
Blynk.syncVirtual(V5);
Blynk.syncVirtual(V6);
}
void setup()
{
Serial.begin(115200);
delay(100);
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
pinMode(led3, OUTPUT);
pinMode(led4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENB, OUTPUT);
BlynkEdgent.begin();
timer.setInterval(500L, hcsr04);
//timer.setInterval(500L, hcsr04);
}
void loop() {
BlynkEdgent.run();
timer.run();
}
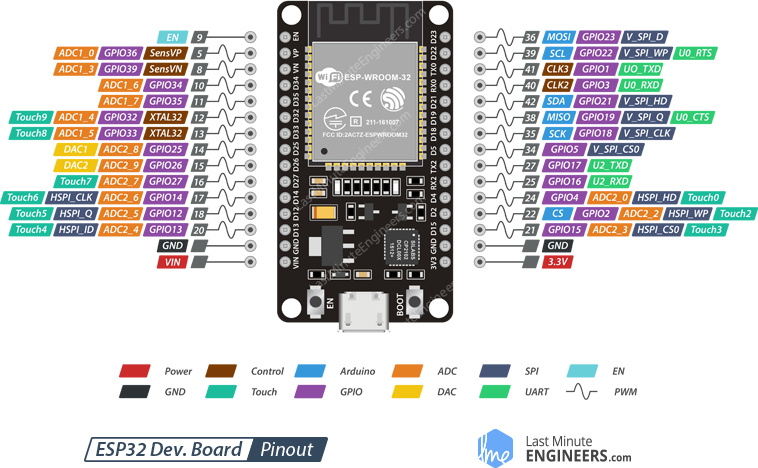
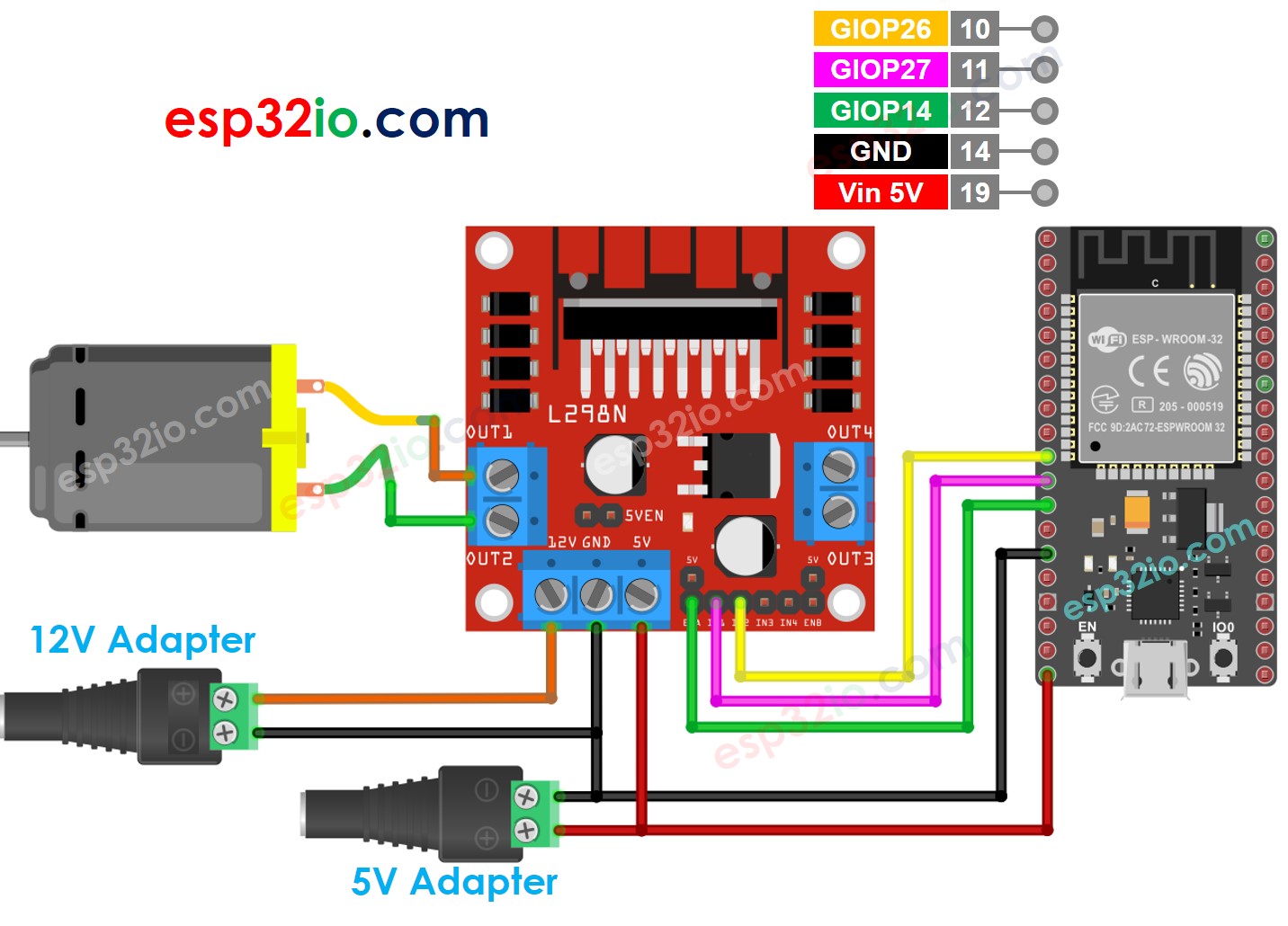
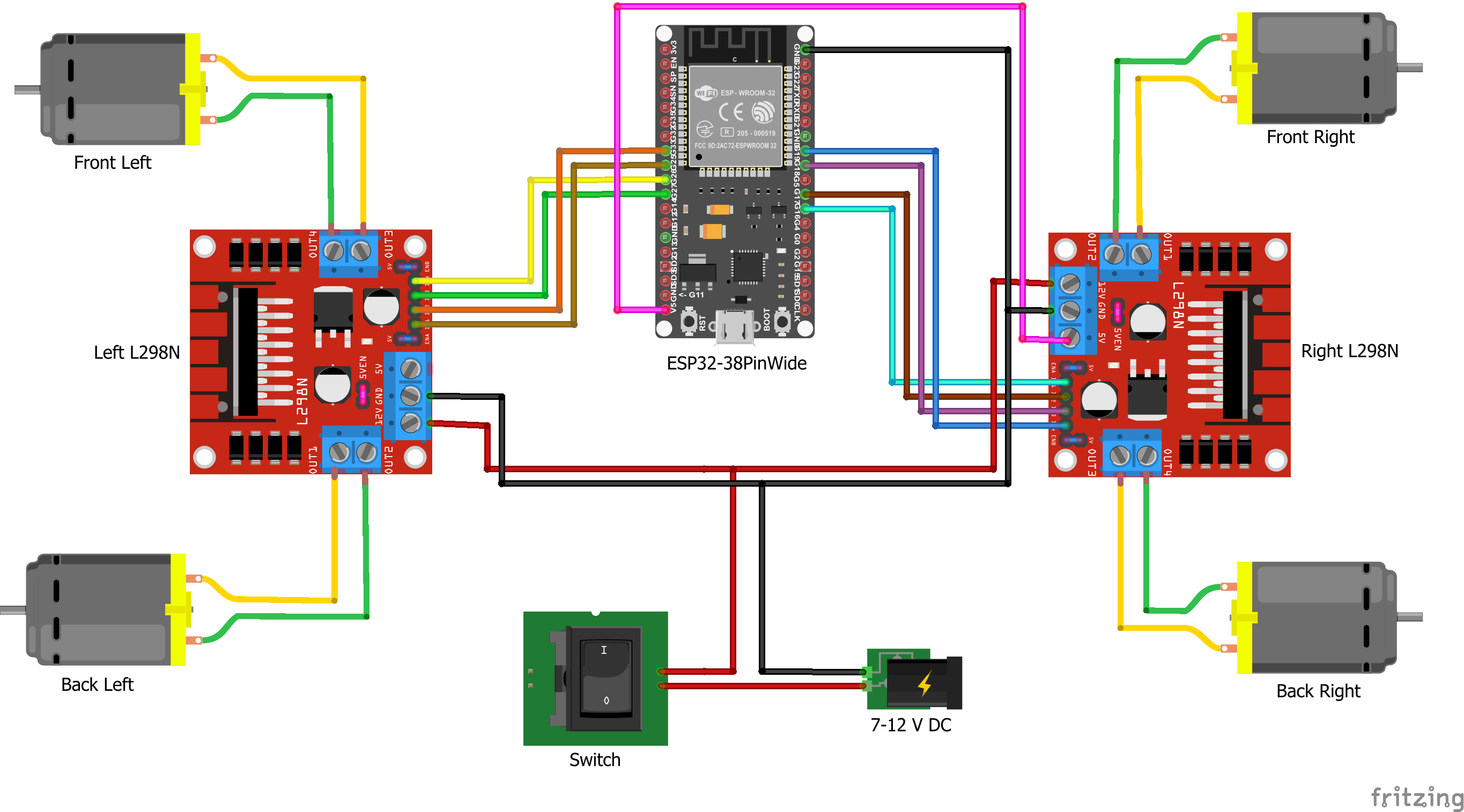
here is scheme of my connection (pins of esp32 are different).
my esp32 pins structure aslo uploaded