Keep an eye out for the big reveal in like a month 
2 Likes
Hmmm, I think an an eddy-current brake would be a useful improvement over a mountain bike V-brake on that gas-powered trike. Especially if it’s Blynk controlled!
You don’t need no stinking brakes on a drift bike… you simply drift around the Hobbit house, across the shire, over the cliff and into the ocean… OK… perhaps a momentum defeating process or parachute is in order 
SMALL UPDATE
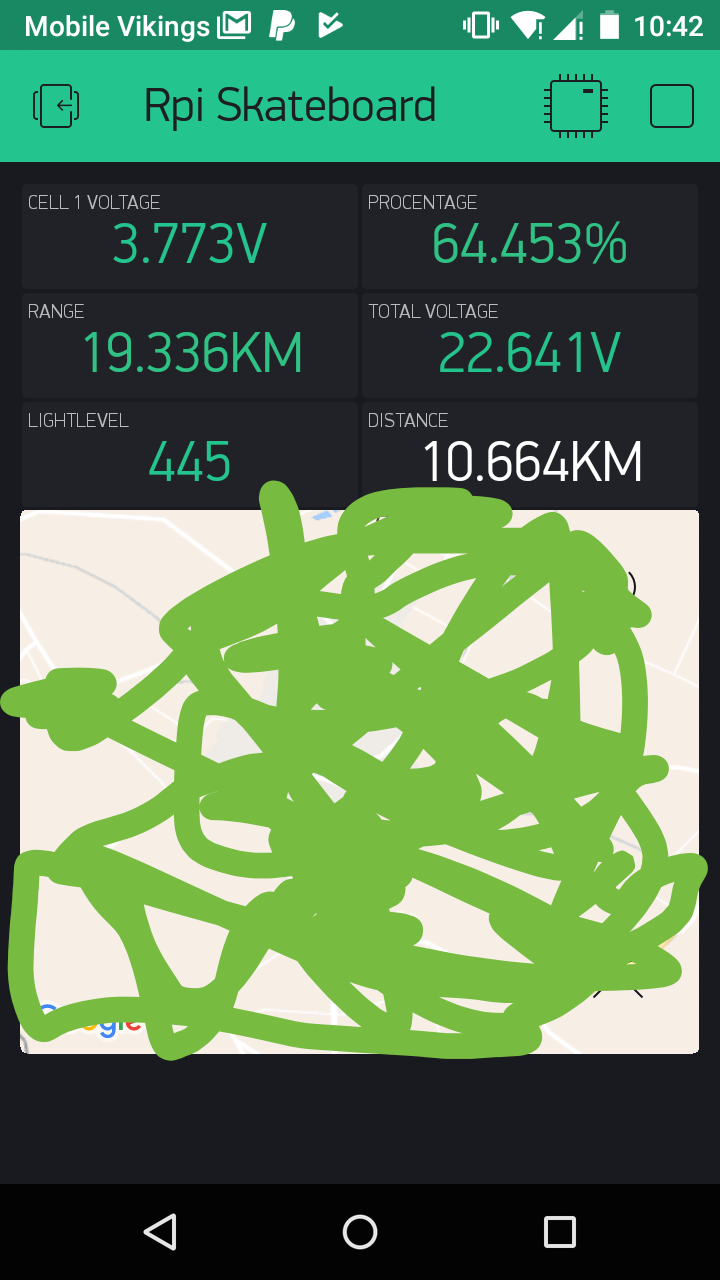
i can now monitor the battery levels from the blynk app using the code from @Costas and @speed57 with some small adjustments to fit my needs. Thanks for sharing the code guys much appreciated 
Also added a light sensor to make the lights go on by them automatically but thats not really interesting.
Picture below
2 Likes
Hello @Dema323, I really need help. I too am trying to use the Blynk app to make my own electric skateboard. I am just now doing some of the examples to get myself acquainted with the app, but my goal is to use the app to control the board. I literally have all the supplies (motor, board, VESC, batteries, connectors, arduino), but I just have no idea how i can get this project up and running with the app, specifically integrating the Blynk/arduino protocol with the VESC/Motor relationship. It would be great if you (or anybody else who’s done this before) could lend me some advice with the programming and hardware wiring. Thank you.
You would need a microcontroller that regulates the voltage on the esc. Im sure there are instructables about this you could find
I’ve been looking for about 2 months and haven’t found anybody doing this or anything that makes sense to me. I did get advice to use a ESP32 microcontroller, simply because it makes up for the WiFi and BLE gap that an arduino does not have. What kind of microcontroller did you use for your project if you dont mind me asking?
What? Nobody is doing this??..motorized skateboard… or this… motorized skateboard with remote control… or perhaps not this… motorized skateboard with IoT based remote control.
Or are you referring to Blynk specifically… which is really no different than ALL the rest, except for the type of IoT interface.
So build your board (motor, VESC controller, battery, charge/discharge controller, etc.) based on some or all those various available options… then worry about the final interface once you have something to connect it to for testing.
I used esp’s and a raspberry pi, but i didn’t control the throttle with my phone. It was just for battery levels and some light or so, don’t remember exactly. I would not suggest using your phone as a controller, if you fall you break it. But if your cheap rc remote falls well, will probably be fine.
But daaaad… I’m not tir…er…d…zzzzzz 

Actually I tend to be more alert in the evenings, early mornings (18:00-04:00 or thereabouts), but my wake sleep schedule is all out of wack, so you never know when I might be lurking about 
I think its an american thing just got a friend on steam from the us who logged in on rust. Its 2am where he is. You guys are weird.
You think them Yanks are strange… us Canucks are totally Loonie Toonie (yes, that is what we officially call our $1 & $2 coins)

Oh damn i forgot or didn’t know you were canadian.
I cant find anybody doing a motorozed skateboard with IoT based remote control. I have all the components of the board (deck, vesc controller, and battery) and I even have a HM10 module for when i thought BLE would be an option. But after finding the Blynk app, their BLE function is in beta and still “requires wifi connectivity”. Are you recommending I just make a numchuck contoller and figure out the IoT interface after I have a running prototype? Because if so, i would want to but I would just be running into the same questions later in my finalization process ab the IoT controller. How does the UART port transmit data from the VESC to the controller in a usual set up, and what is the difference btw that set up and the VESC>arduino/raspberrypi>IoT setup? Im just completely lost on how the UART works bc even in my VESC-tool app the UART Application Settings tab has nothing under it, just the baud rate, and I dont want to assume that you just plug in gnd, power, tx-rx, and rx-tx and now everything works.
I agree, its really just a proof of concept design for a class project, if I were to ever use the board (and I get this IoT controller to work) I would modify it to a simpler rc remote design.
The vesc takes his commands in the changes in voltage (like everything tbh) you need to figure out what specific voltage means go forward,backwards etc. There are people who did this, i even remember someone controlling a drone or a plane with blynk. drones,rc planes,rc cars they al work the same way so maybe start looking for how to use arduino for drone instead of skateboard. As drones are a much more popular topic.
I don’t have any fansnazzy VESC controllers, just old skool H-Bridges, but from the reading & watching I have done, they don’t take their control signals from the UART, that is probably more for programming/tweaking internal management & response settings. AFAIK They work like all other motor controllers and respond to PWM signals from some form of controller… hand throttle or MCU.
Regardless, we teach you how to learn about Blynk here, not how to build RC vehicles… so yes, start searching and learning until you have it built… by then you will probably have a better understanding of what we talk about and can decide if Blynk is the right control option for you.
BTW, Blynk is a IoT based system, so a trio of…
App <–internet/network–> Server ← internet/network—> Hardware.
So, in order to use it properly/safely with something like a moving vehicle, you need to also incorporate a Local Server into said vehicle… so very much more advanced then simply setting up control widgets and a little code.
1 Like
I dream of an lcd display widget with 4 rows 
1 Like