In file included from C:\Users\KUMAR-PC\Documents\Arduino\libraries\Blynk\src/Blynk/BlynkApi.h:17:0,
from C:\Users\KUMAR-PC\Documents\Arduino\libraries\Blynk\src/BlynkApiArduino.h:14,
from C:\Users\KUMAR-PC\Documents\Arduino\libraries\Blynk\src/BlynkSimpleEsp8266.h:24,
from C:\Users\KUMAR-PC\Desktop\spybot_nodemcu_programme\spybot_nodemcu_programme.ino:6:
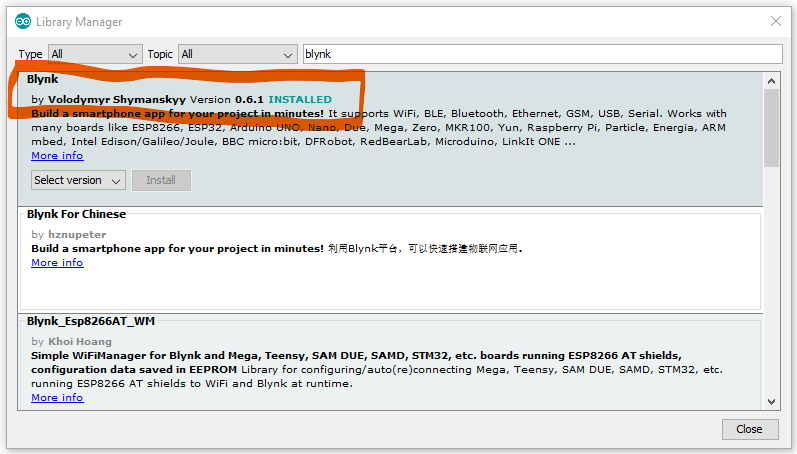
C:\Users\KUMAR-PC\Documents\Arduino\libraries\Blynk\src/Blynk/BlynkTimer.h:36:21: error: redefinition of ‘class BlynkTimer’
#define SimpleTimer BlynkTimer
^
C:\Users\KUMAR-PC\Documents\Arduino\libraries\SimpleTimer/SimpleTimer.h:10:7: note: in expansion of macro ‘SimpleTimer’
class SimpleTimer {
^
C:\Users\KUMAR-PC\Documents\Arduino\libraries\Blynk\src/Blynk/BlynkTimer.h:36:21: error: previous definition of ‘class BlynkTimer’
#define SimpleTimer BlynkTimer
^
C:\Users\KUMAR-PC\Documents\Arduino\libraries\Blynk\src/Blynk/BlynkTimer.h:41:7: note: in expansion of macro ‘SimpleTimer’
class SimpleTimer {
^
exit status 1
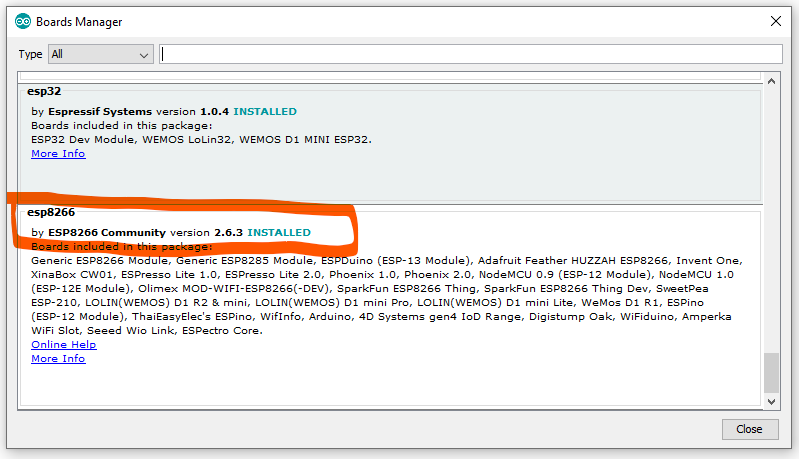
Error compiling for board NodeMCU 1.0 (ESP-12E Module).
my code
#include <ESP8266WiFi.h>
#include <BlynkSimpleEsp8266.h>
#include <SoftwareSerial.h>
#include <SimpleTimer.h>
SimpleTimer timer;
int pinValue1;
int pinValue2;
int pinValue3;
int pinValue4;
String v2arduino; // values to arduino
char auth[] = "";
// Your WiFi credentials.
// Set password to "" for open networks.
char ssid[] = "";
char pass[] = "";
String myString; // complete message from arduino, which consistors of snesors data
char rdata; // received charactors
int firstVal, secondVal,thirdVal; // sensors
// This function sends Arduino's up time every second to Virtual Pin (1).
// In the app, Widget's reading frequency should be set to PUSH. This means
// that you define how often to send data to Blynk App.
void myTimerEvent()
{
// You can send any value at any time.
// Please don't send more that 10 values per second.
Blynk.virtualWrite(V1, millis() / 1000);
}
void setup()
{
// Debug console
Serial.begin(9600);
Blynk.begin(auth, ssid, pass);
timer.setInterval(1000L,sensorvalue1);
timer.setInterval(1000L,sensorvalue2);
timer.setInterval(1000L,sensorvalue3);
}
void loop()
{
if (Serial.available() == 0 )
{
Blynk.run();
timer.run(); // Initiates BlynkTimer
toarduino();
}
if (Serial.available() > 0 )
{
rdata = Serial.read();
myString = myString+ rdata;
// Serial.print(rdata);
if( rdata == '\n')
{
// new code
String l = getValue(myString, ',', 0);
String m = getValue(myString, ',', 1);
String n = getValue(myString, ',', 2);
firstVal = l.toInt();
secondVal = m.toInt();
thirdVal = n.toInt();
myString = "";
// end new code
}
}
}
void sensorvalue1()
{
int sdata = firstVal;
// You can send any value at any time.
// Please don't send more that 10 values per second.
Blynk.virtualWrite(V2, sdata);
}
void sensorvalue2()
{
int sdata = secondVal;
// You can send any value at any time.
// Please don't send more that 10 values per second.
Blynk.virtualWrite(V3, sdata);
}
void sensorvalue3()
{
int sdata = thirdVal;
// You can send any value at any time.
// Please don't send more that 10 values per second.
Blynk.virtualWrite(V4, sdata);
}
String getValue(String data, char separator, int index)
{
int found = 0;
int strIndex[] = { 0, -1 };
int maxIndex = data.length() - 1;
for (int i = 0; i <= maxIndex && found <= index; i++) {
if (data.charAt(i) == separator || i == maxIndex) {
found++;
strIndex[0] = strIndex[1] + 1;
strIndex[1] = (i == maxIndex) ? i+1 : i;
}
}
return found > index ? data.substring(strIndex[0], strIndex[1]) : "";
}
// in Blynk app writes values to the Virtual Pin V3
BLYNK_WRITE(V10)
{
pinValue1 = param.asInt(); // assigning incoming value from pin V10 to a variable
}
// in Blynk app writes values to the Virtual Pin V4
BLYNK_WRITE(V11)
{
pinValue2 = param.asInt(); // assigning incoming value from pin V10 to a variable
}
// in Blynk app writes values to the Virtual Pin V5, this is for the slider
BLYNK_WRITE(V12)
{
pinValue3 = param.asInt(); // assigning incoming value from pin V10 to a variable
}
void toarduino()
{
v2arduino = v2arduino + pinValue1 + "," + pinValue2 + "," + pinValue3;
Serial.println(v2arduino);
delay(100);
v2arduino = "";
}```