Hi guys, excuse my English, I am using a translator.
Well, I have the code in arduino, (blynk defines them and where the pass and router name goes, I have them right, I just did not put it in the following code) that sends the data to blynk.
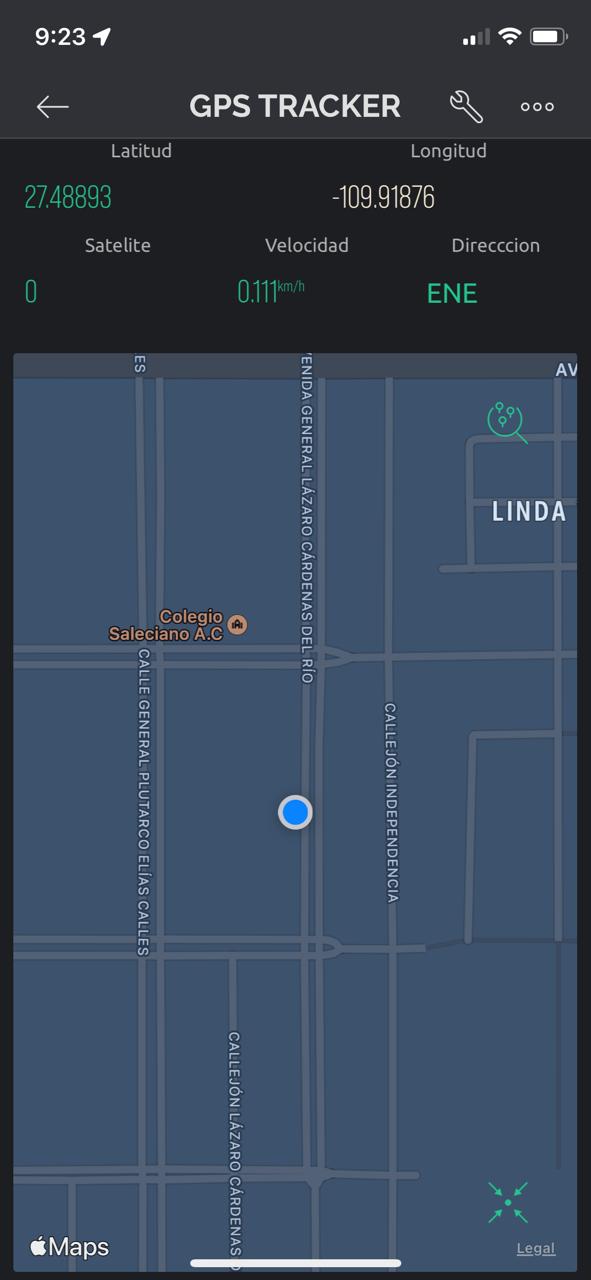
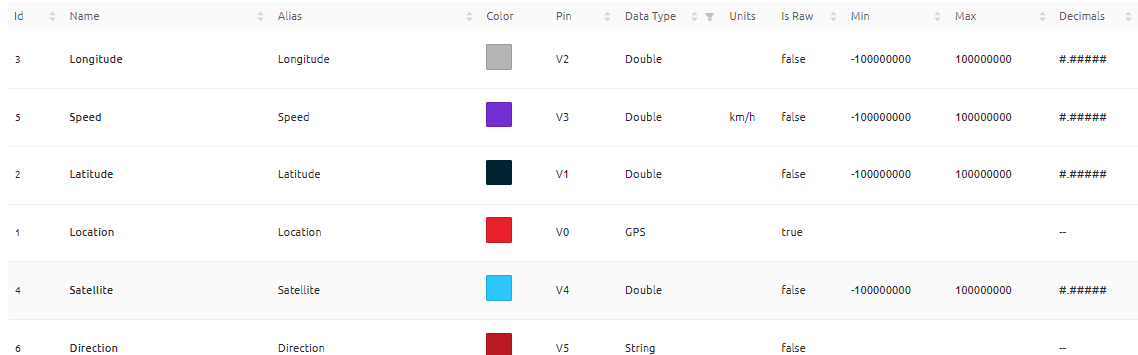
But on the map only appears my location but not the gps as such, if you mark the coordinates above in some labels that I put, but the location (Location V0, so it is assigned on the map of blynk) does not appear the location of the gps, I think it appears immobile in the coordinate 0,0. The truth is that I got the code from a youtube video using an older blynk…
I am using the ESP8266 module and the gps neo 6m.
Thanks in advance, I hope I understand.
#include <TinyGPS++.h>
#include <SoftwareSerial.h>
#define BLYNK_PRINT Serial
#define BLYNK_TEMPLATE_ID ""
#define BLYNK_TEMPLATE_NAME "GPS TRACKER"
#define BLYNK_AUTH_TOKEN ""
#include <ESP8266WiFi.h>
#include <BlynkSimpleEsp8266.h>
static const int RXPin = 4, TXPin = 5; // GPIO 4=D2(conneect Tx of GPS) and GPIO 5=D1(Connect Rx of GPS
static const uint32_t GPSBaud = 9600; //if Baud rate 9600 didn't work in your case then use 4800
TinyGPSPlus gps; // The TinyGPS++ object
WidgetMap myMap(V0); // V0 for virtual pin of Map Widget
SoftwareSerial ss(RXPin, TXPin); // The serial connection to the GPS device
BlynkTimer timer;
float spd; //Variable to store the speed
float sats; //Variable to store no. of satellites response
String bearing; //Variable to store orientation or direction of GPS
char auth[] = ""; //Your Project authentication key
char ssid[] = ""; // Name of your network (HotSpot or Router name)
char pass[] = ""; // Corresponding Password
//unsigned int move_index; // moving index, to be used later
unsigned int move_index = 1; // fixed location for now
void setup()
{
Serial.begin(9600);
Serial.println();
ss.begin(GPSBaud);
Blynk.begin(auth, ssid, pass);
timer.setInterval(5000L, checkGPS); // every 5s check if GPS is connected, only really needs to be done once
}
void checkGPS(){
if (gps.charsProcessed() < 10)
{
Serial.println(F("No GPS detected: check wiring."));
Blynk.virtualWrite(V4, "GPS ERROR"); // Value Display widget on V4 if GPS not detected
}
}
void loop()
{
while (ss.available() > 0)
{
// sketch displays information every time a new sentence is correctly encoded.
if (gps.encode(ss.read()))
displayInfo();
}
Blynk.run();
timer.run();
}
void displayInfo()
{
if (gps.location.isValid() )
{
float latitude = (gps.location.lat()); //Storing the Lat. and Lon.
float longitude = (gps.location.lng());
Serial.print("LAT: ");
Serial.println(latitude, 6); // float to x decimal places
Serial.print("LONG: ");
Serial.println(longitude, 6);
Blynk.virtualWrite(V1, String(latitude, 6));
Blynk.virtualWrite(V2, String(longitude, 6));
myMap.location(move_index, latitude, longitude, "GPS_Location");
spd = gps.speed.kmph(); //get speed
Blynk.virtualWrite(V3, spd);
sats = gps.satellites.value(); //get number of satellites
Blynk.virtualWrite(V4, sats);
bearing = TinyGPSPlus::cardinal(gps.course.value()); // get the direction
Blynk.virtualWrite(V5, bearing);
}
Serial.println();
}