We are working on a baby monitor system using an ESP32-CAM, which is programmed and connected to an Arduino board (Uno). Additionally, we are using a DHT11 temperature and humidity sensor and a KY-037 voice sensor. Our goal is to send the data read from these sensors (temperature, humidity, and sound level) from the Arduino Uno to the ESP32-CAM, which will then transmit this data to the Blynk app for display.
We have successfully set up the live stream feature on the Blynk app using the ESP32-CAM. However, we are struggling to find a way to establish communication between the Arduino Uno and ESP32-CAM to send sensor data to the Blynk app.
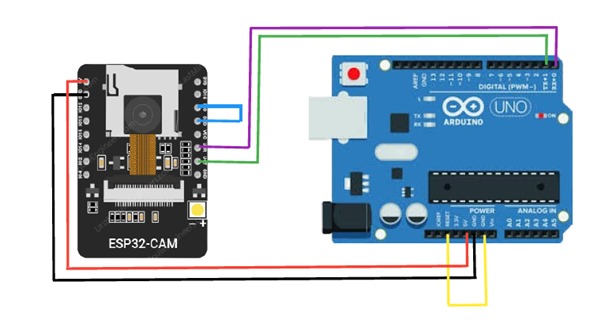
Could someone please guide us on how to achieve this communication between the Arduino Uno and ESP32-CAM, and how to send sensor data to the Blynk app for real-time monitoring of temperature, humidity, and sound level?
Or how to establish serial communication between the Arduino Uno and ESP32-CAM
Any help or insights would be greatly appreciated. Thank you!
here is the working code we’re using to do the live stream.
#define BLYNK_PRINT Serial
#include "OV2640.h"
#include <WiFi.h>
#include <WebServer.h>
#include <WiFiClient.h>
#include <BlynkSimpleEsp32.h>
// Select camera model
//#define CAMERA_MODEL_WROVER_KIT
//#define CAMERA_MODEL_ESP_EYE
//#define CAMERA_MODEL_M5STACK_PSRAM
//#define CAMERA_MODEL_M5STACK_WIDE
#define CAMERA_MODEL_AI_THINKER
#include "camera_pins.h"
char auth[] = BLYNK_AUTH_TOKEN;
const char* ssid = "";
const char* password = "";
OV2640 cam;
WebServer server(80);
const char HEADER[] = "HTTP/1.1 200 OK\r\n" \
"Access-Control-Allow-Origin: *\r\n" \
"Content-Type: multipart/x-mixed-replace; boundary=123456789000000000000987654321\r\n";
const char BOUNDARY[] = "\r\n--123456789000000000000987654321\r\n";
const char CTNTTYPE[] = "Content-Type: image/jpeg\r\nContent-Length: ";
const int hdrLen = strlen(HEADER);
const int bdrLen = strlen(BOUNDARY);
const int cntLen = strlen(CTNTTYPE);
void handle_jpg_stream(void) {
char buf[32];
int s;
WiFiClient client = server.client();
client.write(HEADER, hdrLen);
client.write(BOUNDARY, bdrLen);
while (true) {
if (!client.connected()) break;
cam.run();
s = cam.getSize();
client.write(CTNTTYPE, cntLen);
sprintf( buf, "%d\r\n\r\n", s );
client.write(buf, strlen(buf));
client.write((char *)cam.getfb(), s);
client.write(BOUNDARY, bdrLen);
}
}
const char JHEADER[] = "HTTP/1.1 200 OK\r\n" \
"Content-disposition: inline; filename=capture.jpg\r\n" \
"Content-type: image/jpeg\r\n\r\n";
const int jhdLen = strlen(JHEADER);
void handle_jpg(void) {
WiFiClient client = server.client();
cam.run();
if (!client.connected()) return;
client.write(JHEADER, jhdLen);
client.write((char *)cam.getfb(), cam.getSize());
}
void handleNotFound() {
String message = "Server is running!\n\n";
message += "URI: ";
message += server.uri();
message += "\nMethod: ";
message += (server.method() == HTTP_GET) ? "GET" : "POST";
message += "\nArguments: ";
message += server.args();
message += "\n";
server.send(200, "text / plain", message);
}
void setup() {
Serial.begin(115200);
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
Serial.setDebugOutput(true);
config.frame_size = FRAMESIZE_QVGA;
config.jpeg_quality = 12;
config.fb_count = 2;
#if defined(CAMERA_MODEL_ESP_EYE)
pinMode(13, INPUT_PULLUP);
pinMode(14, INPUT_PULLUP);
#endif
cam.init(config);
IPAddress ip;
WiFi.mode(WIFI_STA);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(F("."));
}
ip = WiFi.localIP();
Serial.println(F("WiFi connected"));
Serial.println("");
// Configure Blynk
Blynk.config(auth);
Serial.println("Connecting to Blynk");
while (Blynk.connect() == false) {
delay(500);
Serial.print(".");
}
Serial.println("\nConnected to Blynk");
Serial.println(ip);
Serial.print("Stream Link: http://");
Serial.print(ip);
Serial.println("/mjpeg/1");
server.on("/mjpeg/1", HTTP_GET, handle_jpg_stream);
server.on("/jpg", HTTP_GET, handle_jpg);
server.onNotFound(handleNotFound);
server.begin();
}
void loop() {
Blynk.run();
// Handle web server client
server.handleClient();
}
BLYNK_WRITE(V1) {
// When the Video Streaming widget receives a request, send the camera stream
if (param.asInt() == 1) {
// Capture a frame from the camera
camera_fb_t *fb = esp_camera_fb_get();
if (fb) {
// Convert the frame buffer to uint8_t*
uint8_t *frameBuffer = fb->buf;
// Send the frame to the Video Streaming widget
Blynk.virtualWriteBinary(V1, frameBuffer, fb->len);
// Release the frame buffer
esp_camera_fb_return(fb);
}
}
}