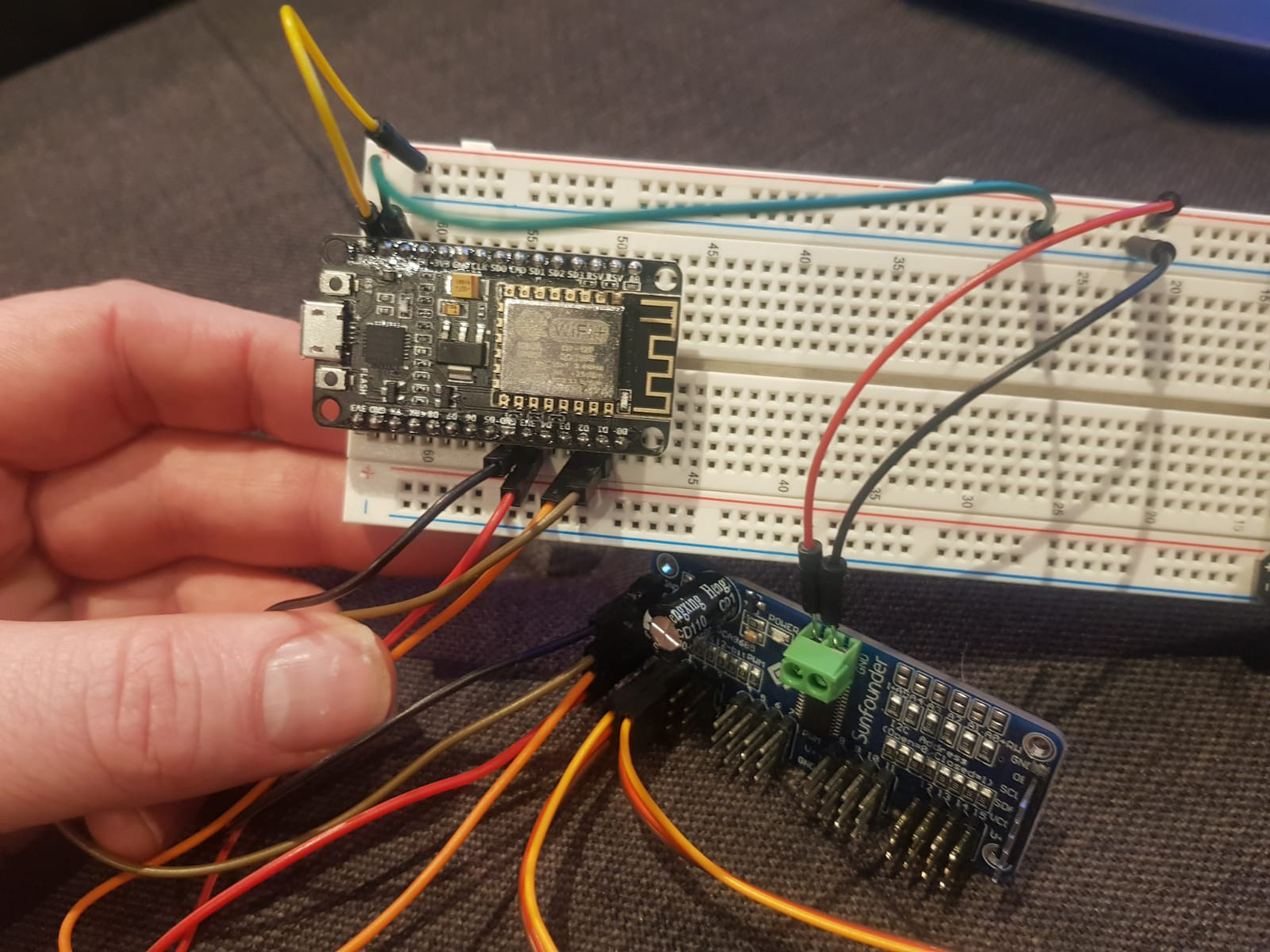
I’ve got some code that controls 5 servos with a potentiometer through a PCA9685. Im trying to incorporate Blynk into it as well but not having much luck. Im not too experienced with the code side of things. If anyone wouldn’t mind taking a look and letting me know if im close or way off that would be great! Also checked previous posts regarding the PCA9685 but still struggling.
On the Blynk side of things i have 3 sliders all 0 - 180 and each point to V1, V2, V3
Thanks
Gav
#define BLYNK_PRINT Serial
#include <ESP8266WiFi.h>
#include <BlynkSimpleEsp8266.h>
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
// PCA9685 outputs = 12-bit = 4096 steps
// 2.5% of 20ms = 0.5ms ; 12.5% of 20ms = 2.5ms
// 2.5% of 4096 = 102 steps; 12.5% of 4096 = 512 steps
uint8_t servonum = 4;
int InValue;
// Second Servo
#define SERVOMIN 125 // this is the 'minimum' pulse length count (out of 4096)
#define SERVOMAX 575 //
;char auth[] = "****";
char ssid[] = "****";
char pass[] = "****";
void setup()
{
Serial.begin(9600);
Blynk.begin(auth, ssid, pass);
Wire.begin(); // Wire must be started first
pwm.begin();
pwm.setPWMFreq(60);
}
void loop()
{
Blynk.run();
InValue=analogRead(D2);
map(InValue,0,4095,SERVOMIN,SERVOMAX);
}
BLYNK_WRITE(V1)
{
pwm.setPWM(0, 0, InValue);
}
BLYNK_WRITE(V2)
{
pwm.setPWM(1, 0, InValue);
}
BLYNK_WRITE(V3)
{
pwm.setPWM(2, 0, InValue);
}