So, a few updates… I now have it working entirely on Blynk and the Wemos D1 Mini Pro; Gear change, LED, Motion and even Video.
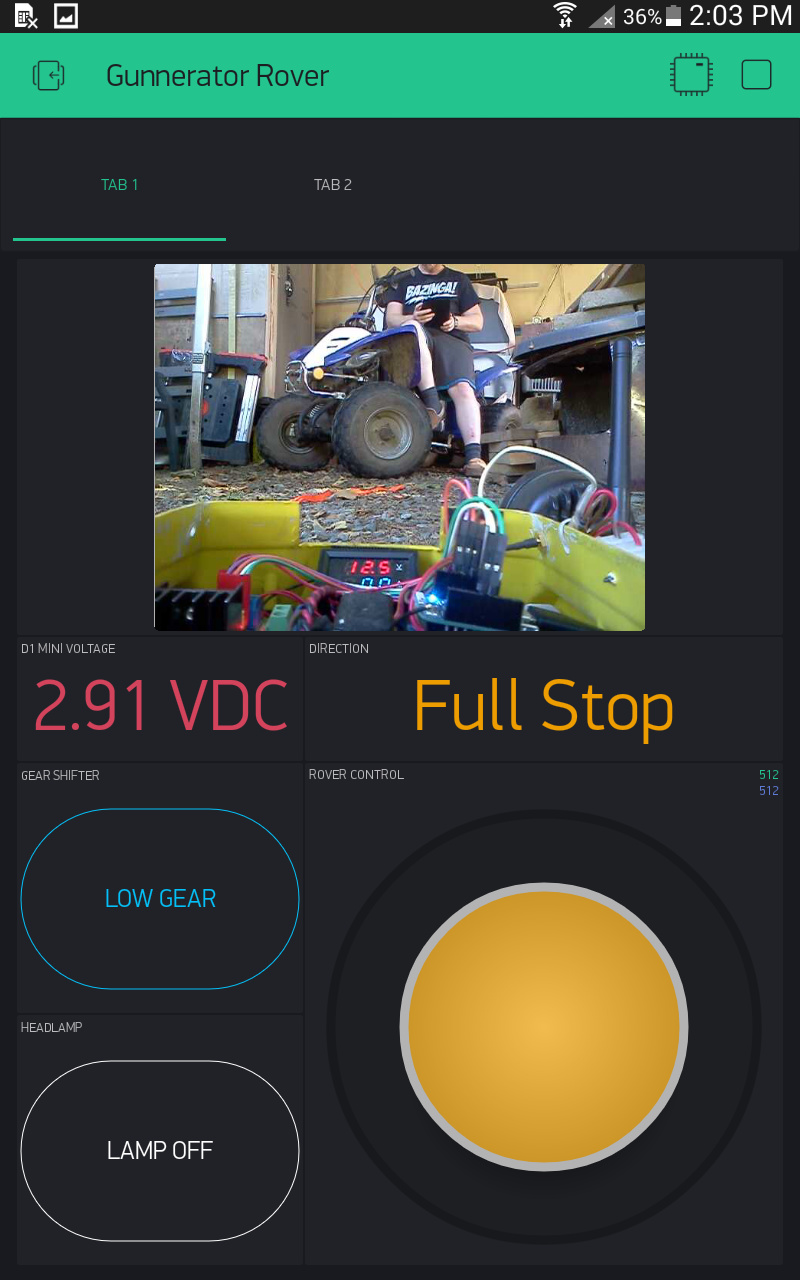
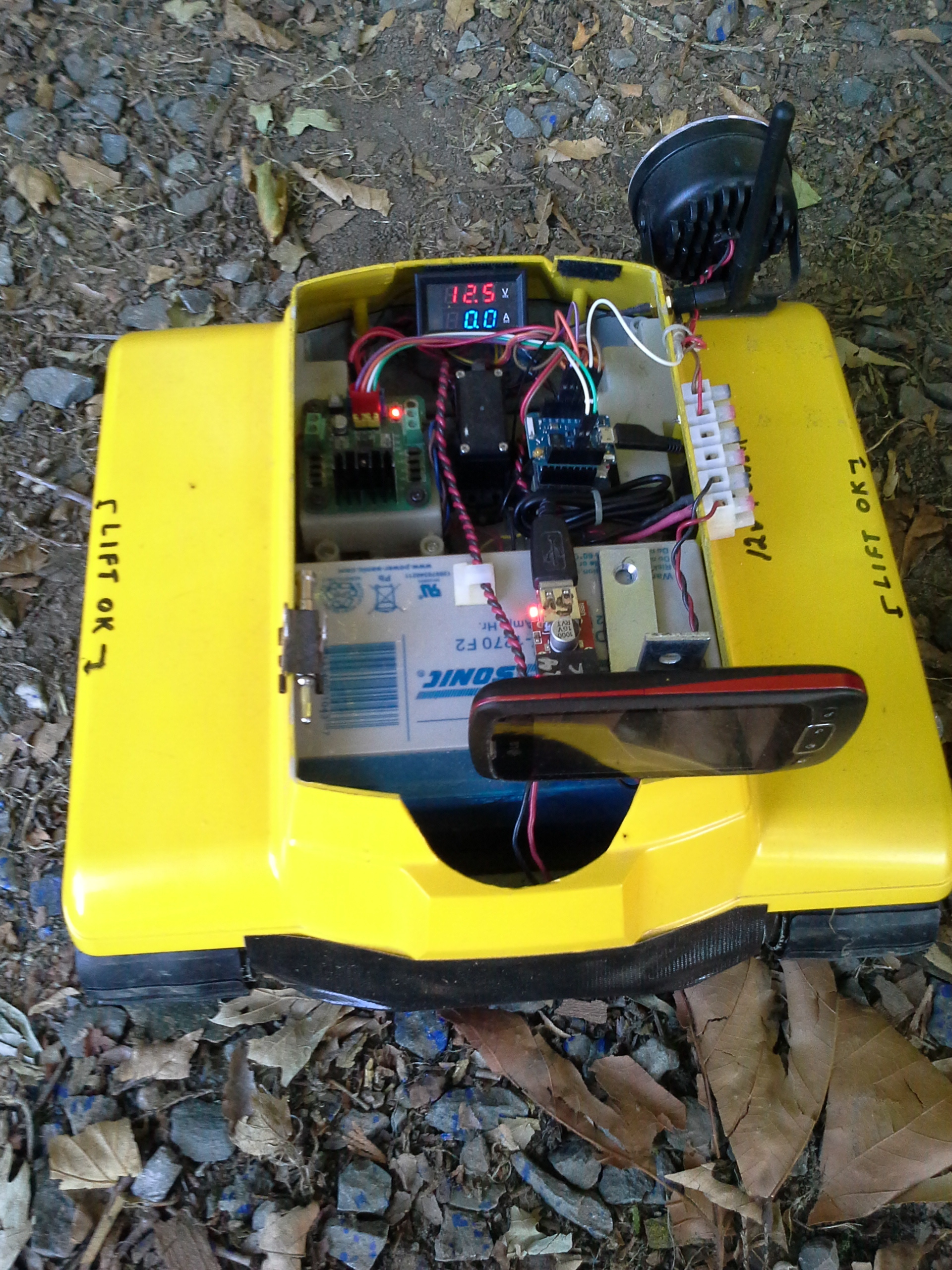

Right now the voltage display is the ESP’s internal voltage… next is to switch that over to the 12v battery level with a voltage divider.
Current code:
#include <Servo.h>
#include <ESP8266WiFi.h>
#include <BlynkSimpleEsp8266.h>
// For OTA:
#include <ESP8266mDNS.h>
#include <WiFiUdp.h>
#include <ArduinoOTA.h>
ADC_MODE(ADC_VCC); // For monitoring of internal voltage levels
// Setup L298N Motor Controller Input Pins:
int IN1 = D6; // Motor 2
int IN2 = D5; // Motor 2
int IN3 = D2; // Motor 1
int IN4 = D1; // Motor 1
int servoPin = 0;
int Flag = 1;
char incomingByte;
//Setup WiFi:
char auth[] = "xxxxx";
char ssid[] = "xxxxx";
char pass[] = "xxxxx";
char server[] = "blynk-cloud.com";
int port = 8080;
BlynkTimer timer;
Servo myservo;
void setup()
{
// setup L298N Motor Controller Input Pins:
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(2, OUTPUT);
// Set to LOW gear:
myservo.attach(servoPin);
myservo.write(0);
timer.setInterval(1000L, StopServo);
Blynk.begin(auth, ssid, pass, server, port); // Set for Local Server
timer.setInterval(1000L, VCCInput); // Battery Check timer
// For OTA:
ArduinoOTA.setHostname("Gunnerator - Wemos D1 Mini Pro");
ArduinoOTA.begin();
}
// Servo controlled gearing:
BLYNK_WRITE(V8) {
if (param.asInt() == 1) {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
myservo.attach(servoPin);
myservo.write(175); // High gear
timer.setTimeout(1500L, StopServo);
} else {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
myservo.attach(servoPin);
myservo.write(0); // Low gear
timer.setTimeout(1500L, StopServo);
}
}
// Headlamp Control:
BLYNK_WRITE(V9) {
if (param.asInt() == 1) {
digitalWrite(2, HIGH); // Headlamp ON
} else {
digitalWrite(2, LOW); // Headlamp OFF
}
}
void StopServo() {
myservo.detach();
}
// Joystick Widget Input:
BLYNK_WRITE(V6)
{
Flag = 1;
int y = param[1].asInt();
int x = param[0].asInt();
if (y > 750 && Flag == 1) { // Forward
Flag = 0;
incomingByte = '1';
ControlOutput();
}
if (y < 250 && Flag == 1) { // Backward
Flag = 0;
incomingByte = '2';
ControlOutput();
}
if (x < 250 && Flag == 1) { // Left
Flag = 0;
incomingByte = '3';
ControlOutput();
}
if (x > 750 && Flag == 1) { // Right
Flag = 0;
incomingByte = '4';
ControlOutput();
}
if (y == 512 && y == 512) { // Full Stop
incomingByte = '0';
ControlOutput();
}
}
// Button Widgets Input:
BLYNK_WRITE(V2) { // Forward
if (param.asInt() == 1) {
incomingByte = '1';
} else {
incomingByte = '0';
}
Blynk.virtualWrite(V7, "Forward");
ControlOutput();
}
BLYNK_WRITE(V3) { // Backward
if (param.asInt() == 1) {
incomingByte = '2';
} else {
incomingByte = '0';
}
Blynk.virtualWrite(V7, "Backward");
ControlOutput();
}
BLYNK_WRITE(V4) { // Left
if (param.asInt() == 1) {
incomingByte = '3';
} else {
incomingByte = '0';
}
Blynk.virtualWrite(V7, "Spin Left");
ControlOutput();
}
BLYNK_WRITE(V5) { // Right
if (param.asInt() == 1) {
incomingByte = '4';
} else {
incomingByte = '0';
}
Blynk.virtualWrite(V7, "Spin Right");
ControlOutput();
}
// Take inputs and direct motor control functions:
void ControlOutput() {
switch (incomingByte) {
case '1': {
motor1Forward();
motor2Forward();
Blynk.virtualWrite(V1, "Forward");
}
break;
case '2': {
motor1Backwards();
motor2Backwards();
Blynk.virtualWrite(V1, "Backward");
}
break;
case '3': {
motor1Backwards();
motor2Forward();
Blynk.virtualWrite(V1, "Spin Left");
}
break;
case '4': {
motor1Forward();
motor2Backwards();
Blynk.virtualWrite(V1, "Spin Right");
}
break;
default: {
Blynk.virtualWrite(V1, "Full Stop");
Blynk.virtualWrite(V7, "Full Stop");
motor1Stop();
motor2Stop();
Flag = 1;
}
break;
}
}
// Functions to control L298N Motor Controller Input Pins:
void motor1Forward() {
digitalWrite(IN4, HIGH);
digitalWrite(IN3, LOW);
}
void motor1Backwards() {
digitalWrite(IN4, LOW);
digitalWrite(IN3, HIGH);
}
void motor1Stop() {
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}
void motor2Forward() {
digitalWrite(IN2, HIGH);
digitalWrite(IN1, LOW);
}
void motor2Backwards() {
digitalWrite(IN2, LOW);
digitalWrite(IN1, HIGH);
}
void motor2Stop() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
}
// Simple monitoring of internal voltage levels:
void VCCInput() {
Blynk.virtualWrite(V0, ESP.getVcc() * 0.001);
}
void loop()
{
Blynk.run();
timer.run();
ArduinoOTA.handle(); // For OTA
}