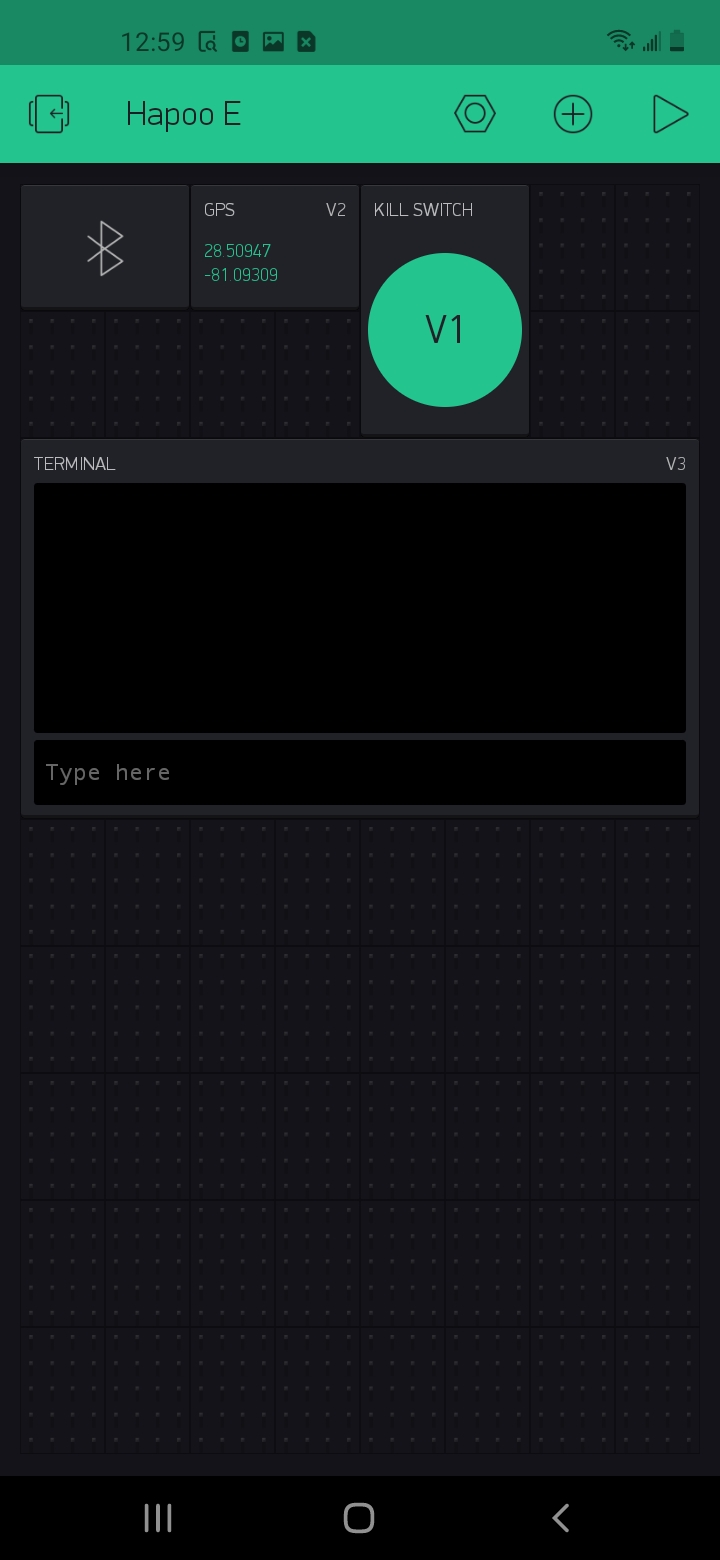
Hi, Pete thanks for reaching out my full code is this. Im new to this so heres my github repository where I put all the code for it Link. I am using a Arduino uno clone called elegoo uno R3. I have added a Bluetooth widget, kill switch, terminal, and gps. heres a screenshot.
#define BLYNK_USE_DIRECT_CONNECT
// Imports
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_HMC5883_U.h>
#include <Servo.h>
#include <SoftwareSerial.h>
#include <BlynkSimpleSerialBLE.h>
#include "./TinyGPS.h" // Use local version of this library
#include "./CoolerDefinitions.h"
// GPS
TinyGPS gps;
// Lid
Servo lidServo;
CoolerLid lidState = CLOSED;
// Master Enable
bool enabled = false;
//WidgetTerminal terminal(V3);
// Serial components
SoftwareSerial bluetoothSerial(BLUETOOTH_TX_PIN, BLUETOOTH_RX_PIN);
SoftwareSerial nss(GPS_TX_PIN, 255); // TXD to digital pin 6
/* Compass */
Adafruit_HMC5883_Unified mag = Adafruit_HMC5883_Unified(12345);
GeoLoc checkGPS() {
Serial.println("Reading onboard GPS: ");
bool newdata = false;
unsigned long start = millis();
while (millis() - start < GPS_UPDATE_INTERVAL) {
if (feedgps())
newdata = true;
}
if (newdata) {
return gpsdump(gps);
}
GeoLoc coolerLoc;
coolerLoc.lat = 0.0;
coolerLoc.lon = 0.0;
return coolerLoc;
}
// Get and process GPS data
GeoLoc gpsdump(TinyGPS &gps) {
float flat, flon;
unsigned long age;
gps.f_get_position(&flat, &flon, &age);
GeoLoc coolerLoc;
coolerLoc.lat = flat;
coolerLoc.lon = flon;
Serial.print(coolerLoc.lat, 7); Serial.print(", "); Serial.println(coolerLoc.lon, 7);
return coolerLoc;
}
// Feed data as it becomes available
bool feedgps() {
while (nss.available()) {
if (gps.encode(nss.read()))
return true;
}
return false;
}
// Lid Hook
BLYNK_WRITE(V0) {
switch (lidState) {
case OPENED:
setServo(SERVO_LID_CLOSE);
lidState = CLOSED;
break;
case CLOSED:
setServo(SERVO_LID_OPEN);
lidState = OPENED;
break;
}
}
// Killswitch Hook
BLYNK_WRITE(V1) {
enabled = !enabled;
//Stop the wheels
stop();
}
// GPS Streaming Hook
BLYNK_WRITE(V2) {
GpsParam gps(param);
Serial.println("Received remote GPS: ");
// Print 7 decimal places for Lat
Serial.print(gps.getLat(), 7); Serial.print(", "); Serial.println(gps.getLon(), 7);
GeoLoc phoneLoc;
phoneLoc.lat = gps.getLat();
phoneLoc.lon = gps.getLon();
driveTo(phoneLoc, GPS_STREAM_TIMEOUT);
}
// Terminal Hook
BLYNK_WRITE(V3) {
Serial.print("Received Text: ");
Serial.println(param.asStr());
String rawInput(param.asStr());
int colonIndex;
int commaIndex;
do {
commaIndex = rawInput.indexOf(',');
colonIndex = rawInput.indexOf(':');
if (commaIndex != -1) {
String latStr = rawInput.substring(0, commaIndex);
String lonStr = rawInput.substring(commaIndex+1);
if (colonIndex != -1) {
lonStr = rawInput.substring(commaIndex+1, colonIndex);
}
float lat = latStr.toFloat();
float lon = lonStr.toFloat();
if (lat != 0 && lon != 0) {
GeoLoc waypoint;
waypoint.lat = lat;
waypoint.lon = lon;
Serial.print("Waypoint found: "); Serial.print(lat); Serial.println(lon);
driveTo(waypoint, GPS_WAYPOINT_TIMEOUT);
}
}
rawInput = rawInput.substring(colonIndex + 1);
} while (colonIndex != -1);
}
void displayCompassDetails(void)
{
sensor_t sensor;
mag.getSensor(&sensor);
Serial.println("------------------------------------");
Serial.print ("Sensor: "); Serial.println(sensor.name);
Serial.print ("Driver Ver: "); Serial.println(sensor.version);
Serial.print ("Unique ID: "); Serial.println(sensor.sensor_id);
Serial.print ("Max Value: "); Serial.print(sensor.max_value); Serial.println(" uT");
Serial.print ("Min Value: "); Serial.print(sensor.min_value); Serial.println(" uT");
Serial.print ("Resolution: "); Serial.print(sensor.resolution); Serial.println(" uT");
Serial.println("------------------------------------");
Serial.println("");
delay(500);
}
#ifndef DEGTORAD
#define DEGTORAD 0.0174532925199432957f
#define RADTODEG 57.295779513082320876f
#endif
float geoBearing(struct GeoLoc &a, struct GeoLoc &b) {
float y = sin(b.lon-a.lon) * cos(b.lat);
float x = cos(a.lat)*sin(b.lat) - sin(a.lat)*cos(b.lat)*cos(b.lon-a.lon);
return atan2(y, x) * RADTODEG;
}
float geoDistance(struct GeoLoc &a, struct GeoLoc &b) {
const float R = 6371000; // km
float p1 = a.lat * DEGTORAD;
float p2 = b.lat * DEGTORAD;
float dp = (b.lat-a.lat) * DEGTORAD;
float dl = (b.lon-a.lon) * DEGTORAD;
float x = sin(dp/2) * sin(dp/2) + cos(p1) * cos(p2) * sin(dl/2) * sin(dl/2);
float y = 2 * atan2(sqrt(x), sqrt(1-x));
return R * y;
}
float geoHeading() {
/* Get a new sensor event */
sensors_event_t event;
mag.getEvent(&event);
// Hold the module so that Z is pointing 'up' and you can measure the heading with x&y
// Calculate heading when the magnetometer is level, then correct for signs of axis.
float heading = atan2(event.magnetic.y, event.magnetic.x);
// Offset
heading -= DECLINATION_ANGLE;
heading -= COMPASS_OFFSET;
// Correct for when signs are reversed.
if(heading < 0)
heading += 2*PI;
// Check for wrap due to addition of declination.
if(heading > 2*PI)
heading -= 2*PI;
// Convert radians to degrees for readability.
float headingDegrees = heading * 180/M_PI;
// Map to -180 - 180
while (headingDegrees < -180) headingDegrees += 360;
while (headingDegrees > 180) headingDegrees -= 360;
return headingDegrees;
}
void setServo(int pos) {
lidServo.attach(SERVO_PIN);
lidServo.write(pos);
delay(2000);
lidServo.detach();
}
void setSpeedMotorA(int speed) {
digitalWrite(MOTOR_A_IN_1_PIN, LOW);
digitalWrite(MOTOR_A_IN_2_PIN, HIGH);
// set speed to 200 out of possible range 0~255
analogWrite(MOTOR_A_EN_PIN, speed + MOTOR_A_OFFSET);
}
void setSpeedMotorB(int speed) {
digitalWrite(MOTOR_B_IN_1_PIN, LOW);
digitalWrite(MOTOR_B_IN_2_PIN, HIGH);
// set speed to 200 out of possible range 0~255
analogWrite(MOTOR_B_EN_PIN, speed + MOTOR_B_OFFSET);
}
void setSpeed(int speed)
{
// this function will run the motors in both directions at a fixed speed
// turn on motor A
setSpeedMotorA(speed);
// turn on motor B
setSpeedMotorB(speed);
}
void stop() {
// now turn off motors
digitalWrite(MOTOR_A_IN_1_PIN, LOW);
digitalWrite(MOTOR_A_IN_2_PIN, LOW);
digitalWrite(MOTOR_B_IN_1_PIN, LOW);
digitalWrite(MOTOR_B_IN_2_PIN, LOW);
}
void drive(int distance, float turn) {
int fullSpeed = 230;
int stopSpeed = 0;
// drive to location
int s = fullSpeed;
if ( distance < 8 ) {
int wouldBeSpeed = s - stopSpeed;
wouldBeSpeed *= distance / 8.0f;
s = stopSpeed + wouldBeSpeed;
}
int autoThrottle = constrain(s, stopSpeed, fullSpeed);
autoThrottle = 230;
float t = turn;
while (t < -180) t += 360;
while (t > 180) t -= 360;
Serial.print("turn: ");
Serial.println(t);
Serial.print("original: ");
Serial.println(turn);
float t_modifier = (180.0 - abs(t)) / 180.0;
float autoSteerA = 1;
float autoSteerB = 1;
if (t < 0) {
autoSteerB = t_modifier;
} else if (t > 0){
autoSteerA = t_modifier;
}
Serial.print("steerA: "); Serial.println(autoSteerA);
Serial.print("steerB: "); Serial.println(autoSteerB);
int speedA = (int) (((float) autoThrottle) * autoSteerA);
int speedB = (int) (((float) autoThrottle) * autoSteerB);
setSpeedMotorA(speedA);
setSpeedMotorB(speedB);
}
void driveTo(struct GeoLoc &loc, int timeout) {
nss.listen();
GeoLoc coolerLoc = checkGPS();
bluetoothSerial.listen();
if (coolerLoc.lat != 0 && coolerLoc.lon != 0 && enabled) {
float d = 0;
//Start move loop here
do {
nss.listen();
coolerLoc = checkGPS();
bluetoothSerial.listen();
d = geoDistance(coolerLoc, loc);
float t = geoBearing(coolerLoc, loc) - geoHeading();
Serial.print("Distance: ");
Serial.println(geoDistance(coolerLoc, loc));
Serial.print("Bearing: ");
Serial.println(geoBearing(coolerLoc, loc));
Serial.print("heading: ");
Serial.println(geoHeading());
drive(d, t);
timeout -= 1;
} while (d > 3.0 && enabled && timeout>0);
stop();
}
}
void setupCompass() {
/* Initialise the compass */
if(!mag.begin())
{
/* There was a problem detecting the HMC5883 ... check your connections */
Serial.println("Ooops, no HMC5883 detected ... Check your wiring!");
while(1);
}
/* Display some basic information on this sensor */
displayCompassDetails();
}
void setup()
{
// Compass
setupCompass();
// Motor pins
pinMode(MOTOR_A_EN_PIN, OUTPUT);
pinMode(MOTOR_B_EN_PIN, OUTPUT);
pinMode(MOTOR_A_IN_1_PIN, OUTPUT);
pinMode(MOTOR_A_IN_2_PIN, OUTPUT);
pinMode(MOTOR_B_IN_1_PIN, OUTPUT);
pinMode(MOTOR_B_IN_2_PIN, OUTPUT);
pinMode(LED_BUILTIN, OUTPUT);
digitalWrite(LED_BUILTIN, HIGH);
//Debugging via serial
Serial.begin(4800);
//GPS
nss.begin(9600);
//Bluetooth
bluetoothSerial.begin(38400);
Blynk.begin(bluetoothSerial, auth);
}
// Testing
void testDriveNorth() {
float heading = geoHeading();
int testDist = 10;
Serial.println(heading);
while(!(heading < 5 && heading > -5)) {
drive(testDist, heading);
heading = geoHeading();
Serial.println(heading);
delay(500);
}
stop();
}
void loop()
{
Blynk.run();
}
// Blynk Auth
char auth[] = "FxwInNKuU9p2dmTzOpDkMxrkysB6QIg1";
// Pin variables
#define SERVO_PIN 3
#define GPS_TX_PIN 4
#define GPS_RX_PIN 3
#define BLUETOOTH_TX_PIN 10
#define BLUETOOTH_RX_PIN 11
#define MOTOR_A_EN_PIN 5
#define MOTOR_B_EN_PIN 9
#define MOTOR_A_IN_1_PIN 7
#define MOTOR_A_IN_2_PIN 8
#define MOTOR_B_IN_1_PIN 12
#define MOTOR_B_IN_2_PIN 6
// If one motor tends to spin faster than the other, add offset
#define MOTOR_A_OFFSET 10
#define MOTOR_B_OFFSET 10
// You must then add your 'Declination Angle' to the compass, which is the 'Error' of the magnetic field in your location.
// Find yours here: http://www.magnetic-declination.com/
// Mine is: 13° 24' E (Positive), which is ~13 Degrees, or (which we need) 0.23 radians
#define DECLINATION_ANGLE 0.10f
// The offset of the mounting position to true north
// It would be best to run the /examples/magsensor sketch and compare to the compass on your smartphone
#define COMPASS_OFFSET 0.0f
// How often the GPS should update in MS
// Keep this above 1000
#define GPS_UPDATE_INTERVAL 1000
// Number of changes in movement to timeout for GPS streaming
// Keeps the cooler from driving away if there is a problem
#define GPS_STREAM_TIMEOUT 18
// Number of changes in movement to timeout for GPS waypoints
// Keeps the cooler from driving away if there is a problem
#define GPS_WAYPOINT_TIMEOUT 45
// PWM write for servo locations
#define SERVO_LID_OPEN 20
#define SERVO_LID_CLOSE 165
// Definitions (don't edit these)
struct GeoLoc {
float lat;
float lon;
};
enum CoolerLid {
OPENED,
CLOSED
};
#include "Arduino.h"
#include "TinyGPS.h"
#define _GPRMC_TERM "GPRMC"
#define _GPGGA_TERM "GPGGA"
TinyGPS::TinyGPS()
: _time(GPS_INVALID_TIME)
, _date(GPS_INVALID_DATE)
, _latitude(GPS_INVALID_ANGLE)
, _longitude(GPS_INVALID_ANGLE)
, _altitude(GPS_INVALID_ALTITUDE)
, _speed(GPS_INVALID_SPEED)
, _course(GPS_INVALID_ANGLE)
, _last_time_fix(GPS_INVALID_FIX_TIME)
, _last_position_fix(GPS_INVALID_FIX_TIME)
, _parity(0)
, _is_checksum_term(false)
, _sentence_type(_GPS_SENTENCE_OTHER)
, _term_number(0)
, _term_offset(0)
, _gps_data_good(false)
#ifndef _GPS_NO_STATS
, _encoded_characters(0)
, _good_sentences(0)
, _failed_checksum(0)
#endif
{
_term[0] = '\0';
}
//
// public methods
//
bool TinyGPS::encode(char c)
{
bool valid_sentence = false;
++_encoded_characters;
switch(c)
{
case ',': // term terminators
_parity ^= c;
case '\r':
case '\n':
case '*':
if (_term_offset < sizeof(_term))
{
_term[_term_offset] = 0;
valid_sentence = term_complete();
}
++_term_number;
_term_offset = 0;
_is_checksum_term = c == '*';
return valid_sentence;
case '$': // sentence begin
_term_number = _term_offset = 0;
_parity = 0;
_sentence_type = _GPS_SENTENCE_OTHER;
_is_checksum_term = false;
_gps_data_good = false;
return valid_sentence;
}
// ordinary characters
if (_term_offset < sizeof(_term) - 1)
_term[_term_offset++] = c;
if (!_is_checksum_term)
_parity ^= c;
return valid_sentence;
}
#ifndef _GPS_NO_STATS
void TinyGPS::stats(unsigned long *chars, unsigned short *sentences, unsigned short *failed_cs)
{
if (chars) *chars = _encoded_characters;
if (sentences) *sentences = _good_sentences;
if (failed_cs) *failed_cs = _failed_checksum;
}
#endif
//
// internal utilities
//
int TinyGPS::from_hex(char a)
{
if (a >= 'A' && a <= 'F')
return a - 'A' + 10;
else if (a >= 'a' && a <= 'f')
return a - 'a' + 10;
else
return a - '0';
}
unsigned long TinyGPS::parse_decimal()
{
char *p = _term;
bool isneg = *p == '-';
if (isneg) ++p;
unsigned long ret = 100UL * gpsatol(p);
while (gpsisdigit(*p)) ++p;
if (*p == '.')
{
if (gpsisdigit(p[1]))
{
ret += 10 * (p[1] - '0');
if (gpsisdigit(p[2]))
ret += p[2] - '0';
}
}
return isneg ? -ret : ret;
}
unsigned long TinyGPS::parse_degrees()
{
char *p;
unsigned long left = gpsatol(_term);
unsigned long tenk_minutes = (left % 100UL) * 10000UL;
for (p=_term; gpsisdigit(*p); ++p);
if (*p == '.')
{
unsigned long mult = 1000;
while (gpsisdigit(*++p))
{
tenk_minutes += mult * (*p - '0');
mult /= 10;
}
}
return (left / 100) * 100000 + tenk_minutes / 6;
}
// Processes a just-completed term
// Returns true if new sentence has just passed checksum test and is validated
bool TinyGPS::term_complete()
{
if (_is_checksum_term)
{
byte checksum = 16 * from_hex(_term[0]) + from_hex(_term[1]);
if (checksum == _parity)
{
if (_gps_data_good)
{
#ifndef _GPS_NO_STATS
++_good_sentences;
#endif
_last_time_fix = _new_time_fix;
_last_position_fix = _new_position_fix;
switch(_sentence_type)
{
case _GPS_SENTENCE_GPRMC:
_time = _new_time;
_date = _new_date;
_latitude = _new_latitude;
_longitude = _new_longitude;
_speed = _new_speed;
_course = _new_course;
break;
case _GPS_SENTENCE_GPGGA:
_altitude = _new_altitude;
_time = _new_time;
_latitude = _new_latitude;
_longitude = _new_longitude;
break;
}
return true;
}
}
#ifndef _GPS_NO_STATS
else
++_failed_checksum;
#endif
return false;
}
// the first term determines the sentence type
if (_term_number == 0)
{
if (!gpsstrcmp(_term, _GPRMC_TERM))
_sentence_type = _GPS_SENTENCE_GPRMC;
else if (!gpsstrcmp(_term, _GPGGA_TERM))
_sentence_type = _GPS_SENTENCE_GPGGA;
else
_sentence_type = _GPS_SENTENCE_OTHER;
return false;
}
if (_sentence_type != _GPS_SENTENCE_OTHER && _term[0])
switch((_sentence_type == _GPS_SENTENCE_GPGGA ? 200 : 100) + _term_number)
{
case 101: // Time in both sentences
case 201:
_new_time = parse_decimal();
_new_time_fix = millis();
break;
case 102: // GPRMC validity
_gps_data_good = _term[0] == 'A';
break;
case 103: // Latitude
case 202:
_new_latitude = parse_degrees();
_new_position_fix = millis();
break;
case 104: // N/S
case 203:
if (_term[0] == 'S')
_new_latitude = -_new_latitude;
break;
case 105: // Longitude
case 204:
_new_longitude = parse_degrees();
break;
case 106: // E/W
case 205:
if (_term[0] == 'W')
_new_longitude = -_new_longitude;
break;
case 107: // Speed (GPRMC)
_new_speed = parse_decimal();
break;
case 108: // Course (GPRMC)
_new_course = parse_decimal();
break;
case 109: // Date (GPRMC)
_new_date = gpsatol(_term);
break;
case 206: // Fix data (GPGGA)
_gps_data_good = _term[0] > '0';
break;
case 209: // Altitude (GPGGA)
_new_altitude = parse_decimal();
break;
}
return false;
}
long TinyGPS::gpsatol(const char *str)
{
long ret = 0;
while (gpsisdigit(*str))
ret = 10 * ret + *str++ - '0';
return ret;
}
int TinyGPS::gpsstrcmp(const char *str1, const char *str2)
{
while (*str1 && *str1 == *str2)
++str1, ++str2;
return *str1;
}
/* static */
float TinyGPS::distance_between (float lat1, float long1, float lat2, float long2)
{
// returns distance in meters between two positions, both specified
// as signed decimal-degrees latitude and longitude. Uses great-circle
// distance computation for hypothetical sphere of radius 6372795 meters.
// Because Earth is no exact sphere, rounding errors may be up to 0.5%.
// Courtesy of Maarten Lamers
float delta = radians(long1-long2);
float sdlong = sin(delta);
float cdlong = cos(delta);
lat1 = radians(lat1);
lat2 = radians(lat2);
float slat1 = sin(lat1);
float clat1 = cos(lat1);
float slat2 = sin(lat2);
float clat2 = cos(lat2);
delta = (clat1 * slat2) - (slat1 * clat2 * cdlong);
delta = sq(delta);
delta += sq(clat2 * sdlong);
delta = sqrt(delta);
float denom = (slat1 * slat2) + (clat1 * clat2 * cdlong);
delta = atan2(delta, denom);
return delta * 6372795;
}
#ifndef TinyGPS_h
#define TinyGPS_h
#include "Arduino.h"
#define _GPS_VERSION 10 // software version of this library
#define _GPS_MPH_PER_KNOT 1.15077945
#define _GPS_MPS_PER_KNOT 0.51444444
#define _GPS_KMPH_PER_KNOT 1.852
#define _GPS_MILES_PER_METER 0.00062137112
#define _GPS_KM_PER_METER 0.001
//#define _GPS_NO_STATS
class TinyGPS
{
public:
TinyGPS();
bool encode(char c); // process one character received from GPS
TinyGPS &operator << (char c) {encode(c); return *this;}
// lat/long in hundred thousandths of a degree and age of fix in milliseconds
inline void get_position(long *latitude, long *longitude, unsigned long *fix_age = 0)
{
if (latitude) *latitude = _latitude;
if (longitude) *longitude = _longitude;
if (fix_age) *fix_age = _last_position_fix == GPS_INVALID_FIX_TIME ?
GPS_INVALID_AGE : millis() - _last_position_fix;
}
// date as ddmmyy, time as hhmmsscc, and age in milliseconds
inline void get_datetime(unsigned long *date, unsigned long *time, unsigned long *fix_age = 0)
{
if (date) *date = _date;
if (time) *time = _time;
if (fix_age) *fix_age = _last_time_fix == GPS_INVALID_FIX_TIME ?
GPS_INVALID_AGE : millis() - _last_time_fix;
}
// signed altitude in centimeters (from GPGGA sentence)
inline long altitude() { return _altitude; }
// course in last full GPRMC sentence in 100th of a degree
inline unsigned long course() { return _course; }
// speed in last full GPRMC sentence in 100ths of a knot
unsigned long speed() { return _speed; }
#ifndef _GPS_NO_STATS
void stats(unsigned long *chars, unsigned short *good_sentences, unsigned short *failed_cs);
#endif
inline void f_get_position(float *latitude, float *longitude, unsigned long *fix_age = 0)
{
long lat, lon;
get_position(&lat, &lon, fix_age);
*latitude = lat / 100000.0;
*longitude = lon / 100000.0;
}
inline void crack_datetime(int *year, byte *month, byte *day,
byte *hour, byte *minute, byte *second, byte *hundredths = 0, unsigned long *fix_age = 0)
{
unsigned long date, time;
get_datetime(&date, &time, fix_age);
if (year)
{
*year = date % 100;
*year += *year > 80 ? 1900 : 2000;
}
if (month) *month = (date / 100) % 100;
if (day) *day = date / 10000;
if (hour) *hour = time / 1000000;
if (minute) *minute = (time / 10000) % 100;
if (second) *second = (time / 100) % 100;
if (hundredths) *hundredths = time % 100;
}
inline float f_altitude() { return altitude() / 100.0; }
inline float f_course() { return course() / 100.0; }
inline float f_speed_knots() { return speed() / 100.0; }
inline float f_speed_mph() { return _GPS_MPH_PER_KNOT * f_speed_knots(); }
inline float f_speed_mps() { return _GPS_MPS_PER_KNOT * f_speed_knots(); }
inline float f_speed_kmph() { return _GPS_KMPH_PER_KNOT * f_speed_knots(); }
static int library_version() { return _GPS_VERSION; }
enum {GPS_INVALID_AGE = 0xFFFFFFFF, GPS_INVALID_ANGLE = 999999999, GPS_INVALID_ALTITUDE = 999999999, GPS_INVALID_DATE = 0,
GPS_INVALID_TIME = 0xFFFFFFFF, GPS_INVALID_SPEED = 999999999, GPS_INVALID_FIX_TIME = 0xFFFFFFFF};
static float distance_between (float lat1, float long1, float lat2, float long2);
private:
enum {_GPS_SENTENCE_GPGGA, _GPS_SENTENCE_GPRMC, _GPS_SENTENCE_OTHER};
// properties
unsigned long _time, _new_time;
unsigned long _date, _new_date;
long _latitude, _new_latitude;
long _longitude, _new_longitude;
long _altitude, _new_altitude;
unsigned long _speed, _new_speed;
unsigned long _course, _new_course;
unsigned long _last_time_fix, _new_time_fix;
unsigned long _last_position_fix, _new_position_fix;
// parsing state variables
byte _parity;
bool _is_checksum_term;
char _term[15];
byte _sentence_type;
byte _term_number;
byte _term_offset;
bool _gps_data_good;
#ifndef _GPS_NO_STATS
// statistics
unsigned long _encoded_characters;
unsigned short _good_sentences;
unsigned short _failed_checksum;
unsigned short _passed_checksum;
#endif
// internal utilities
int from_hex(char a);
unsigned long parse_decimal();
unsigned long parse_degrees();
bool term_complete();
bool gpsisdigit(char c) { return c >= '0' && c <= '9'; }
long gpsatol(const char *str);
int gpsstrcmp(const char *str1, const char *str2);
};
// Arduino 0012 workaround
#undef int
#undef char
#undef long
#undef byte
#undef float
#undef abs
#undef round
#endif