Hi everyone,
I’m struggling to get OTA work with an Arduino R4 Wifi board, which is enabled with Blynk NCP. To start, I followed Blink NCP documentation to flash the board with Platform IO.
The device was then successfully added with the Blynk mobile app and by Wifi pairing with BLE.
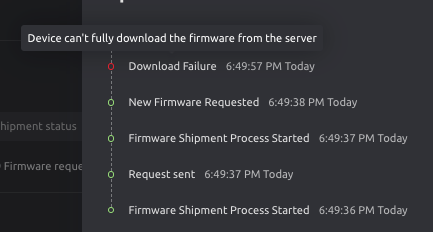
Now, when I try to ship a new firmware, I got an error message which says “Download Failure” and in details “device can’t fully download the firmware from server” :
What could I miss here ? OTA should be supported with this board, but maybe something is missing with my code to get it work ? For example, do I need to setup httpclient and url somewhere ? Also I’m not sure if OTA package tagging is mandatory in my case.
Thank you.
// Blynk Definition
#define BLYNK_TEMPLATE_ID "*******"
#define BLYNK_TEMPLATE_NAME "Premium Tank"
#define BLYNK_FIRMWARE_VERSION "0.1.3"
#define BLYNK_PRINT Serial
// URM14 Definition
#define SLAVE_ADDR ((uint16_t)0x0C)
#define TEMP_CPT_SEL_BIT ((uint16_t)0x01)
#define TEMP_CPT_ENABLE_BIT ((uint16_t)0x01 << 1)
#define MEASURE_MODE_BIT ((uint16_t)0x01 << 2)
#define MEASURE_TRIG_BIT ((uint16_t)0x01 << 3)
// ModbusMaster Definition
#define MAX485_DE 3
#define MAX485_RE_NEG 2
#include <BlynkEdgentNCP.h>
#include <ModbusMaster.h>
// instantiate ModbusMaster object
ModbusMaster node;
//URM14 Index Registers
typedef enum{
ePid,
eVid,
eAddr,
eComBaudrate,
eComParityStop,
eDistance,
eInternalTempreture,
eExternalTempreture,
eControl,
eNoise
}eRegIndex_t;//Sensor register index
//URM14 Function Read
/*
*@brief Read data from holding register of client
*
*@param addr : Address of Client
*@param reg: Reg index
*@return data if execute successfully, false oxffff.
*/
uint16_t readData(eRegIndex_t reg)
{
uint16_t data, result;
result = node.readHoldingRegisters(reg, 1);
if (!result == node.ku8MBSuccess){
Serial.print("failed to read registers! ");
data = 0xffff;
}else{
data = node.getResponseBuffer(0);
Serial.print("data : ");
Serial.print(data);
}
return data;
}
//URM14 Function Write
/*
*@brief write data to holding register of client
*
*@param addr : Address of Client
*@param reg: Reg index
*@param data: The data to be written
*@return 1 if execute successfully, false 0.
*/
uint16_t writeData(eRegIndex_t reg, uint16_t data)
{
uint16_t result;
result = node.writeSingleRegister(reg, data);
if (!result == node.ku8MBSuccess){
Serial.print("Failed to write coil! ");
return 0;
}else
return 1;
}
//Variables Definition
float dist;
volatile float tempInt;
volatile uint16_t cr = 0;
uint16_t tx = 0;
double nbLCuves = 0;
double txCuves = 0;
const int total_l = 5000;
//Blynk Functions
BlynkTimer timer;
BLYNK_CONNECTED() {
BLYNK_LOG("Connected to Blynk 🙌");
Blynk.syncVirtual(V1);
}
BLYNK_DISCONNECTED() {
BLYNK_LOG("Blynk disconnected");
}
//ModbusMaster Functions
void preTransmission()
{
digitalWrite(MAX485_RE_NEG, 1);
digitalWrite(MAX485_DE, 1);
}
void postTransmission()
{
delay(300);
digitalWrite(MAX485_RE_NEG, 0);
digitalWrite(MAX485_DE, 0);
}
//=====================Basic Setup ============================
void setup() {
pinMode(MAX485_RE_NEG, OUTPUT);
pinMode(MAX485_DE, OUTPUT);
// Init in receive mode
delay(300); //accord delay post init
digitalWrite(MAX485_RE_NEG, 0);
digitalWrite(MAX485_DE, 0);
// Serials initialization
Serial.begin(19200);
Serial1.begin(19200);
delay(3000);
//*******************************************BLYNK SETUP
BLYNKSetUp();
timer.setInterval(1000L, myTimerEvent);
node.begin(12, Serial1);
// Callbacks allow us to configure the RS485 transceiver correctly
node.preTransmission(preTransmission);
node.postTransmission(postTransmission);
cr |= MEASURE_MODE_BIT;//Set bit2 , Set to trigger mode
cr &= ~(uint16_t)TEMP_CPT_SEL_BIT;//Select internal temperature compensation
cr &= ~(uint16_t)TEMP_CPT_ENABLE_BIT;//enable temperature compensation
writeData(eControl, cr); //Writes the setting value to the control register
delay(100);
}
void BLYNKSetUp(void) {
BLYNK_LOG("Main firmware: %s", BLYNK_FIRMWARE_VERSION);
BLYNK_LOG("Build: %s", __DATE__ " " __TIME__);
// Initialize the Blynk.NCP hardware
if (Blynk.initNCP()) {
String ver = Blynk.getNcpVersion();
BLYNK_LOG("Blynk.NCP firmware: %s", ver.c_str());
} else {
BLYNK_LOG("Cannot communicate to Blynk.NCP");
BLYNK_LOG(" Please ensure you have flashed your board with the Blynk.NCP firmware, before running this example.");
BLYNK_LOG(" See: https://github.com/blynkkk/BlynkNcpExample");
return;
}
// Print state changes
Blynk.onStateChange([]() {
BLYNK_LOG("State: %s", Blynk.getStateString());
});
// Set config mode timeout to 30 minutes, for testing purposes
Blynk.setConfigTimeout(30*60);
Serial.println("Blynk Connecting");
Blynk.begin(BLYNK_TEMPLATE_ID, BLYNK_TEMPLATE_NAME);
Serial.println("Blynk Connected");
}
void myTimerEvent() {
Serial.println("Creation des variables");
cr |= MEASURE_TRIG_BIT;//Set trig bit
writeData(eControl, cr); //Write the value to the control register and trigger a ranging
delay(300);//Delay of 300ms(minimum delay should be greater than 30ms) is to wait for the completion of ranging
dist = (float)readData(eDistance) / 10;//Read distance register, one LSB is 0.1mm
tempInt = (float)readData(eInternalTempreture) / 10.0;//Read the temperature register, one LSB is 0.1℃
Serial.print("distance = ");
Serial.print(dist, 1);
Serial.println("mm");
delay(100);
nbLCuves = ((1655 - dist) * total_l / 2300);
if (nbLCuves <= 0) {
nbLCuves = 0;
}
txCuves = ((nbLCuves / total_l) * 100);
delay(100);
//*******************************************BLYNK VIRTUAL WRITE
Serial.println("Virtual Writing At Blynk");
Blynk.virtualWrite(V2, nbLCuves);
Serial.print("nbLCuves=");
Serial.println(nbLCuves);
Blynk.virtualWrite(V3, txCuves);
Serial.print("txCuves=");
Serial.println(txCuves);
Blynk.virtualWrite(V4, dist);
Serial.print("dist=");
Serial.println(dist);
Blynk.virtualWrite(V5, tempInt);
Serial.print("tempInt=");
Serial.println(tempInt);
}
void loop() {
Blynk.run();
timer.run(); // Initiates BlynkTimer
delay(1);
}