Can anyone tell me how can I make a 4WD or 2WD Rover using Arduino Nano and HC-05 by Blynk.
I want that Rover to be controlled by blynk over Bluetooth via HC-05, can anyone provide me the code as I don’t have sufficient knowledge about it.
Please I want the code and the Schematics to control it, I’m having a L298N Motor Drive H-Bridge.
You will need your own coding knowledge to do this.
This is a support forum for Blynk. Someone here might want to help based on their own experience but no gaurantees they’ll pop their head in.
You’re best to go and do some playing around, starting with Google “how to install and setup Arduino IDE” then “How to make an led blink with arduino”.
Blynk should only be conceieved as a control interface and not the heart of your project and is advanced if you have zero coding experience.
The heart should be the bespoke code you write yourself.
This is probably a better way to go. It’s a motor controller board that mates to an Arduino Mega. I did that before I started messing with smaller more powerful microcontrollers.
But asking for someone else for code and schematic is hardly conducive to you learning. There are plenty of projects out there for the individual components. As well as lots of how-to videos to get you started.
I’m just wondering why you would want to do this and yet someone else do the work? Just asking. Look around on the Arduino forums and Youtube.
I can help steer you in the right direction. But you will have a lot more fun learning to do simple things first like turning on a led etc. Then build up on that.
This is using a HC-05 and built an app to control it from my phone. I was going to do voice control too but off on too many other projects. I was using Mit App Inventor to build the Android app.
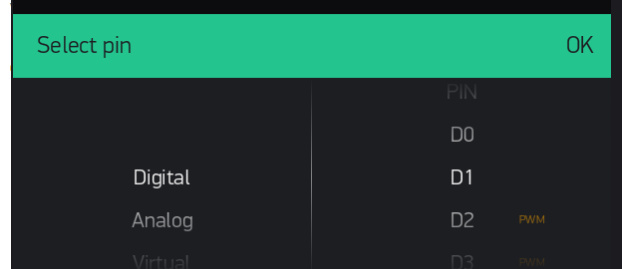
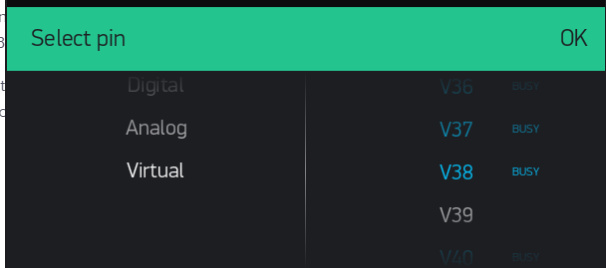
I am also having a doubt, if I use Blynk-Blink(Getting Started) Sketch, it does not define any pin. If I connect LED to pin 2,3 or 4 any other than pin 13 and make a button corresponding to that pin, will the led turn on???
@psoro if I use a ESP8266 will I be able to control it from outside of my home WiFi, using a 3G/4G connection on mobile, and Arduino and ESP8266-01 at home
Start by spending some time reading all the available documentation and help guides… this forum is here to assist with questions about commands, etc… it is NOT here to do it for you, or hold your hand step by step.
All those previously mentioned and supplied links are available at the upper right of this page. For example the Sketch Builder has examples that can get you started…
Controlling a servo with a Slider Widget on a Nano connected via BT (Note: BT does not work on IOS phones, only Android)…
You can use control your ESP from outside using your smartphone as Hotspot.
If you want to prepare your ESP to be connected to several routers, there’re several ways to achieve it, using Blynk Provisioning, WifiManager or wifiMulti, see below for wifiMulti option:
@psoro Can i just put a simple code of Bluetooth Blynk example and connect to HC-05, put pins of L298N IN1,IN2,IN3,IN4 ON 2,3,4,5 pins of Arduino and add buttons on the Blynk app to make them High, will the servos on other side work?
@TechDroidROOT… don’t get me wrong but… I guess this is your project, not mine… I can provide some tips in order to help a little bit as I did, but… you are asking me for the whole project …
Please, search in this forum, there’s enough information for you to achieve your project by yourself.
First… you don’t seem to have the required understanding between a H-bridge - controlling DC motors, and Servo Motors… totaly different items.
While you could manually toggle ON and OFF the INx pins on an H-Bridge… if you turn on the wrong ones at the same time you could create a dead short and could damage the H-Bridge, your power supply and who knows what else.
Please spend some time researching what you want to make… Google is your friend
OP. I recently built a LEGO crawler with a Bluetooth controller using Blynk and a Bluno Beetle + HBridge. I’ll also be adding servos for steering soon. Check out my blog posting about BTBox here: www.plastibots.com
As others have said, you dont use an H-bridge to control servos. Just a PWM digital pin and the Servo library.
 …
…