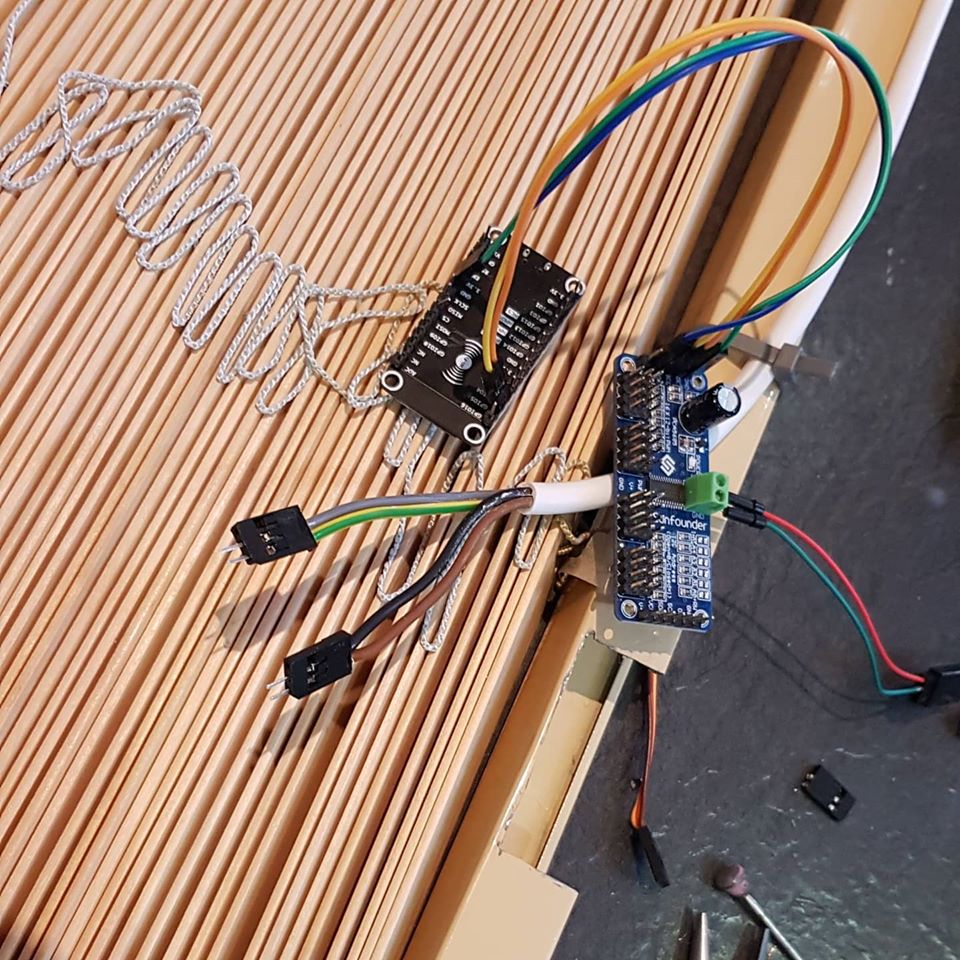
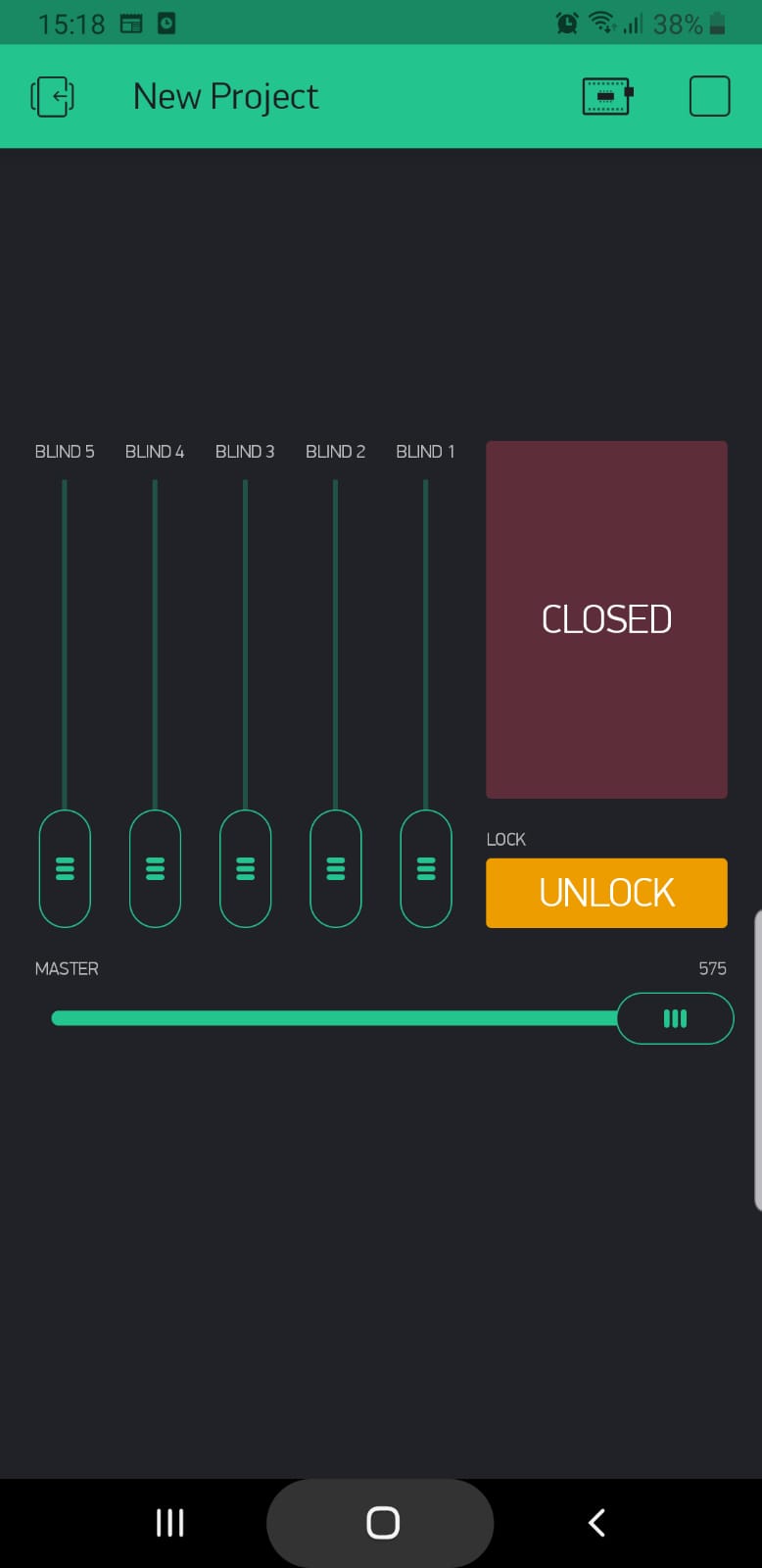
I’ve recently built some automated blinds
using 5 servos into a PCA9685 and ESP8266. All is working fine and i’m happy with it but i’m wondering about servo noise that is happening when the blinds are being held in place (stall position??). If it were one servo it might not be as noticeable but because there is 5 its allot louder. Though you cant really hear it in the video.
I understand the signal should be a loop sending the servo its position, but this might not be an option in this situation. Has anyone come across this before, if so any ideas? Is there a method with code to stop the signal or will i have to add in a relay to cut the power to the servo board?
Im using metal gear mini servos similar to the sg90’s too which isnt helping with the noise either.
Any thoughts or ideas would be appreciated.
Also thanks to PeteKnight for his help on a previous post regarding the PCA9685, was very helpful
Gav