Blynk won’t work with your void loop full of code like this. You need to read this article:
http://help.blynk.cc/getting-started-library-auth-token-code-examples/blynk-basics/keep-your-void-loop-clean
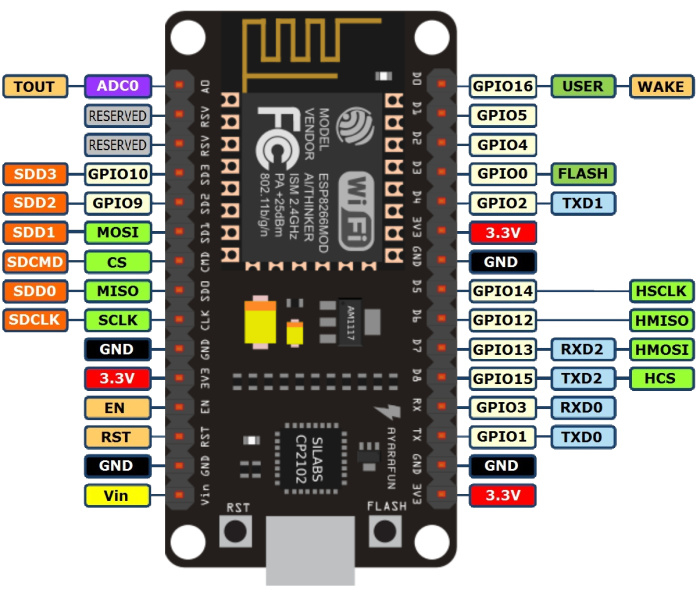
https://pradeepsinghblog.files.wordpress.com/2016/04/nodemcu_pins.png?w=460&zoom=2
Also GPIO2 isn’t D3 on the NodeMCU, it’s D4.
GPIO 0 (Pin D3) isn’t a good Pin to use. Read this:
Pete.
{kind=link}