Hi guys, I’m a beginner with Blynk App and i have a wifi car project to do, but I’ve a big problem with BLynk is that when i’m using the app the application says that my project “wasn’t online yet” so i checked if my esp8266 was connected to the wifi of my phone and it is. I tried looking at other topic on the same subject but i didn’t really understand how the people solved their problem.
So if someone can help me  .
.
I know that some people want to see the code so i will put it under.
#define BLYNK_PRINT Serial
#include <ESP8266WiFi.h>
#include <BlynkSimpleEsp8266.h>
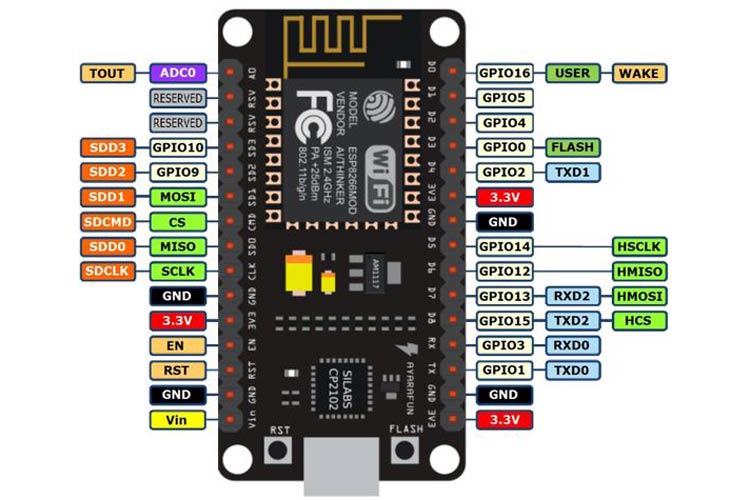
//declaration des emplacements on utilise les pins D5, D6; D7; D8 car ils sont en SPI
int vitmoteurd = 5;
int vitmoteurg = 6;
int dirmoteurd = 7;
int dirmoteurg = 8;
//connexion en wifi
char auth[] = "xxx";///authentifiaction de l'app Blynk
char ssid[] = "xxx";///nom du wifi
char pass[] = "T10hom12fr#ed26";//mot de passe du wifi
//definition des valeurs joystick(Blynk)
int rangenulle = 512;
int rangeminhaut = 712;
int rangeminbas = 312;
int rangemindroite = 712;
int rangemingauche = 312;
//definition de la vitesse
int vitessemin = 450;
int vitessemax = 1020;
int vitessenulle = 0;
//sous-programme controlant la mobilité
void controlmobilite(int y, int x)
{
if(y > rangeminhaut && x > rangemindroite )
{
digitalWrite(dirmoteurd,HIGH);//on laisse le courant passer
digitalWrite(dirmoteurg,HIGH);//on laisse le courant passer
analogWrite(vitmoteurd, vitessemax);//on met a la vitesse max car on va tourner a droite
analogWrite(vitmoteurg, vitessemin);//on met a la vitesse min car on tourne pas a droite fortement
}
else if(y > rangeminhaut && x < rangemingauche )
{
digitalWrite(dirmoteurd,HIGH);//on laisse le courant passer
digitalWrite(dirmoteurg,HIGH);//on laisse le courant passer
analogWrite(vitmoteurd, vitessemin);//on met a la vitesse min car on tourne pas a gauche fortement
analogWrite(vitmoteurg, vitessemax);//on met a la vitesse max car on va tourner a gauche
}
else if(y > rangeminbas && x < rangemingauche )
{
digitalWrite(dirmoteurd,LOW);//on inverse le sens des moteurs
digitalWrite(dirmoteurg,LOW);//on inverse le sens des moteurs
analogWrite(vitmoteurd, vitessemin);//on met a la vitesse min car on tourne pas a gauche fortement
analogWrite(vitmoteurg, vitessemax);//on met a la vitesse max car on va tourner a gauche
}
else if(y > rangeminbas && x > rangemindroite )
{
digitalWrite(dirmoteurd,LOW);//on inverse le sens des moteurs
digitalWrite(dirmoteurg,LOW);//on inverse le sens des moteurs
analogWrite(vitmoteurd, vitessemax);//on met a la vitesse max car on va tourner a droite
analogWrite(vitmoteurg, vitessemin);//on met a la vitesse min car on tourne pas a droite fortement
}
else if(y > rangeminhaut && x <= rangemindroite && x >= rangemingauche)
{
digitalWrite(dirmoteurd,HIGH);//on laisse le courant passer
digitalWrite(dirmoteurg,HIGH);//on laisse le courant passer
analogWrite(vitmoteurd, vitessemax);//on met a la vitesse max car on va tout droit
analogWrite(vitmoteurg, vitessemax);//on met a la vitesse max car on va tout droit
}
else if(y <= rangeminhaut && y >= rangeminbas && x <= rangemingauche)
{
digitalWrite(dirmoteurd,HIGH);//on laisse le courant passer
digitalWrite(dirmoteurg,HIGH);//on laisse le courant passer
analogWrite(vitmoteurd, vitessenulle);//on met a la vitessenulle car on va a gauche
analogWrite(vitmoteurg, vitessemax);//on met a la vitesse max car on va a gauche
}
else if(y <= rangeminhaut && y >= rangeminbas && x >= rangemindroite)
{
digitalWrite(dirmoteurd,HIGH);//on laisse le courant passer
digitalWrite(dirmoteurg,HIGH);//on laisse le courant passer
analogWrite(vitmoteurd, vitessemax);//on met a la vitesse max car on va a droite
analogWrite(vitmoteurg, vitessenulle);//on met a la vitessenulle car on va a droite
}
else if(y < rangeminbas && x <= rangemindroite && x >= rangemingauche)
{
digitalWrite(dirmoteurd,LOW);//on inverse le sens du courant
digitalWrite(dirmoteurg,LOW);//on inverse le sens du courant
analogWrite(vitmoteurd, vitessemax);//on met a la vitesse max car on va tout droit
analogWrite(vitmoteurg, vitessemax);//on met a la vitesse max car on va tout droit
}
else if( y >= rangeminbas && y < rangenulle && x < rangenulle && x >= rangemingauche)
{
digitalWrite(dirmoteurd,LOW);//on va inverser le sens des moteurs
digitalWrite(dirmoteurg,LOW);//on va inverser le sens des moteurs
analogWrite(vitmoteurd, vitessenulle);//on met a la vitesse max car on va tourner lentement a gauche
analogWrite(vitmoteurg, vitessemin);//on met a la vitesse max car on va tourner lentement a gauche
}
else if( y >= rangeminbas && y < rangenulle && x > rangenulle && x <= rangemindroite)
{
digitalWrite(dirmoteurd,LOW);//on va inverser le sens des moteurs
digitalWrite(dirmoteurg,LOW);//on va inverser le sens des moteurs
analogWrite(vitmoteurd, vitessemin);//on met a la vitesse max car on va tourner lentement a droite
analogWrite(vitmoteurg, vitessenulle);//on met a la vitesse max car on va tourner lentement a droite
}
else if( y >= rangeminbas && y < rangenulle && x > rangenulle && x <= rangemindroite)
{
digitalWrite(dirmoteurd,HIGH);
digitalWrite(dirmoteurg,HIGH);
analogWrite(vitmoteurd, vitessemin);//on met a la vitesse max car on va tourner lentement a droite
analogWrite(vitmoteurg, vitessenulle);//on met a la vitesse max car on va tourner lentement a droite
}
else if( y >= rangeminbas && y < rangenulle && x < rangenulle && x >= rangemingauche)
{
digitalWrite(dirmoteurd,HIGH);
digitalWrite(dirmoteurg,HIGH);
analogWrite(vitmoteurd, vitessenulle);//on met a la vitesse max car on va tourner lentement a gauche
analogWrite(vitmoteurg, vitessemin);//on met a la vitesse max car on va tourner lentement a gauche
}
else if(y==rangenulle && x==rangenulle)
{
analogWrite(vitmoteurd, vitessenulle);//on met a la vitesse à 0 car on veut s'areter
analogWrite(vitmoteurg, vitessenulle);//on met a la vitesse à 0 car on veut s'areter
}
}
void setup()
{
//lancement de la communication
Serial.begin(115200);
//lancement de l'app Blynk
Blynk.begin(auth, ssid, pass);
//on definit tous nos pin comme des sorties
pinMode(vitmoteurd, OUTPUT);
pinMode(vitmoteurg, OUTPUT);
pinMode(dirmoteurd, OUTPUT);
pinMode(dirmoteurg, OUTPUT);
digitalWrite(vitmoteurd, LOW);//on n'allume pas directement les moteurs
digitalWrite(vitmoteurg, LOW);//on n'allume pas directement les moteurs
digitalWrite(dirmoteurd, HIGH);//on initialise dans le sens des moteurs
digitalWrite(dirmoteurg, HIGH);//on initialise dans le sens des moteurs
}
void loop()
{
Blynk.run();
}
BLYNK_WRITE(V1)
{
int x = param[0].asInt();
int y = param[1].asInt();
controlmobilite(x,y);
}
And I’m sorry if there are mistake in the text english is not my main language and i’m still learning it