Hi blynk community, im new to blynk, i need help on how to replace the push button with sw420 that are connected with 1 channel relay,im using esp32 ttgo call circuit module embededd with sim800l.,
/*
This is the code for the project
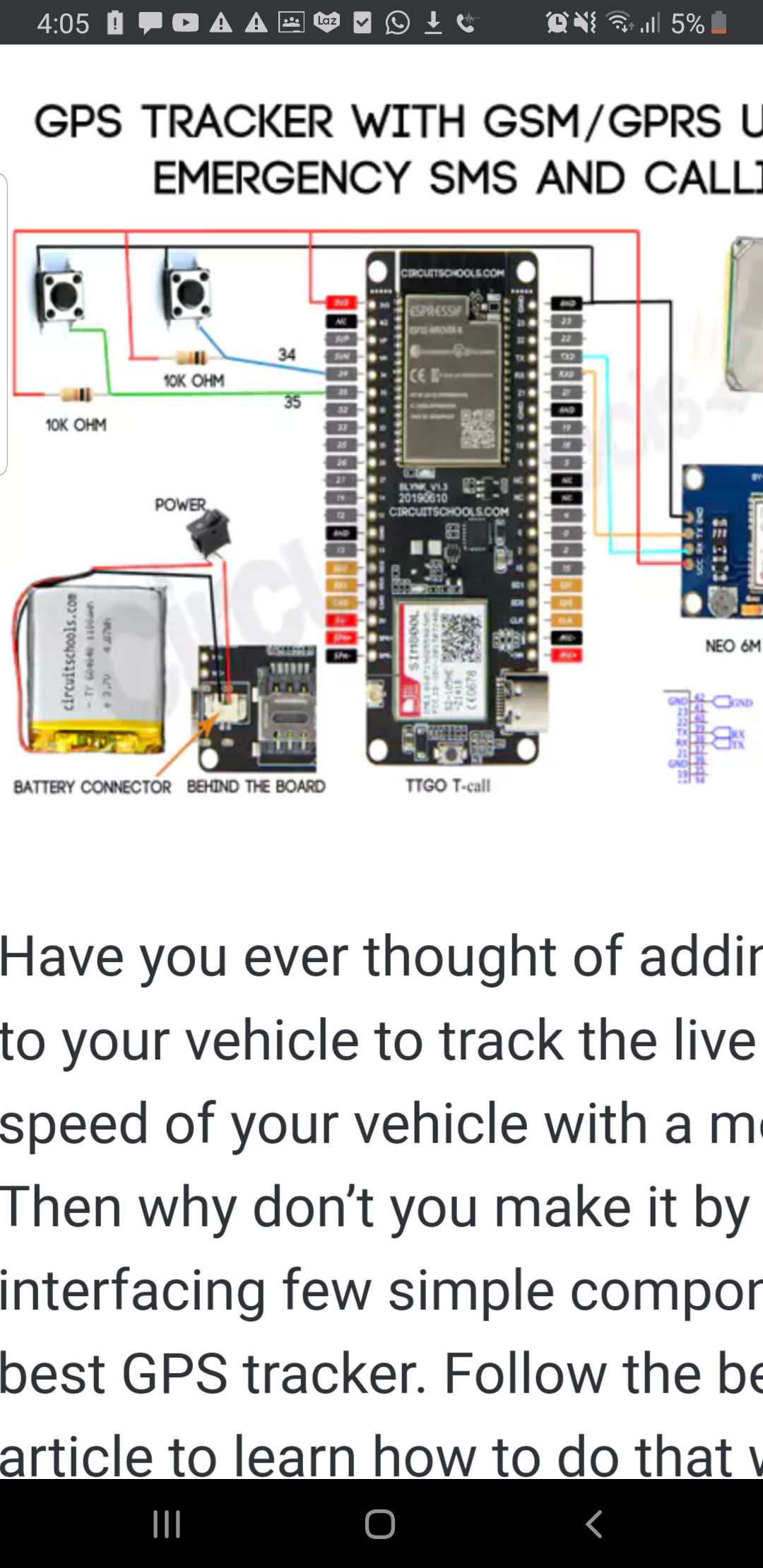
"GPS Tracker with GSM/GPRS using blynk with SMS and calling features"
https://www.circuitschools.com
* */
// TTGO T-Call pin definitions
#define MODEM_RST 5
#define MODEM_PWKEY 4
#define MODEM_POWER_ON 23
#define MODEM_TX 27
#define MODEM_RX 26
#define I2C_SDA 21
#define I2C_SCL 22
#define BLYNK_PRINT Serial
#define BLYNK_HEARTBEAT 30
#define TINY_GSM_MODEM_SIM800
#include <TinyGPS++.h> //https://github.com/mikalhart/TinyGPSPlus
#include <AceButton.h> // https://github.com/bxparks/AceButton
#include <TinyGsmClient.h> // https://github.com/vshymanskyy/TinyGSM
#include <BlynkSimpleSIM800.h> //https://github.com/blynkkk/blynk-library
#include <Wire.h>
#include "utilities.h"
using namespace ace_button;
//Buttons
#define SMS_Button 34
#define Call_Button 35
// Emergency Number and Message
String mobile_number = "Mobile Number with country code";
String message = "It's an Emergency. I'm at this location ";
String message_with_data;
// Variables for storing GPS Data
float latitude;
float longitude;
float speed;
float satellites;
String direction;
// Switch
ButtonConfig config1;
AceButton call_button(&config1);
ButtonConfig config2;
AceButton sms_button(&config2);
void handleEvent_call(AceButton*, uint8_t, uint8_t);
void handleEvent_sms(AceButton*, uint8_t, uint8_t);
// Set serial for GPS Module
#define SerialMon Serial
// Hardware Serial for builtin GSM Module
#define SerialAT Serial1
const char apn[] = "YOUR_NETWORK_APN_HERE";
const char user[] = "";
const char pass[] = "";
// You should get Auth Token in the Blynk App.
// Go to the Project Settings (nut icon).
const char auth[] = "YOUR_BLYNK_AUTH_TOKEN";
//static const int RXPin = 4, TXPin = 5;
static const uint32_t GPSBaud = 9600;
TinyGPSPlus gps;
WidgetMap myMap(V0);
//SoftwareSerial ss(RXPin, TXPin);
BlynkTimer timer;
TinyGsm modem(SerialAT);
unsigned int move_index = 1;
void setup()
{
// Set console baud rate
Serial.begin(9600);
delay(10);
// Keep power when running from battery
Wire.begin(I2C_SDA, I2C_SCL);
bool isOk = setPowerBoostKeepOn(1);
SerialMon.println(String("IP5306 KeepOn ") + (isOk ? "OK" : "FAIL"));
// Set-up modem reset, enable, power pins
pinMode(MODEM_PWKEY, OUTPUT);
pinMode(MODEM_RST, OUTPUT);
pinMode(MODEM_POWER_ON, OUTPUT);
pinMode(SMS_Button, INPUT);
pinMode(Call_Button, INPUT);
digitalWrite(MODEM_PWKEY, LOW);
digitalWrite(MODEM_RST, HIGH);
digitalWrite(MODEM_POWER_ON, HIGH);
// Set GSM module baud rate and UART pins
SerialAT.begin(115200, SERIAL_8N1, MODEM_RX, MODEM_TX);
delay(3000);
// Restart takes quite some time
// To skip it, call init() instead of restart()
SerialMon.println("Initializing modem...");
modem.restart();
String modemInfo = modem.getModemInfo();
SerialMon.print("Modem: ");
SerialMon.println(modemInfo);
// Unlock your SIM card with a PIN
//modem.simUnlock("1234");
SerialMon.print("Waiting for network...");
if (!modem.waitForNetwork(240000L)) {
SerialMon.println(" fail");
delay(10000);
return;
}
SerialMon.println(" OK");
if (modem.isNetworkConnected()) {
SerialMon.println("Network connected");
}
SerialMon.print(F("Connecting to APN: "));
SerialMon.print(apn);
if (!modem.gprsConnect(apn, user, pass)) {
SerialMon.println(" fail");
delay(10000);
return;
}
SerialMon.println(" OK");
// ss.begin(GPSBaud);
Blynk.begin(auth, modem, apn, user, pass);
timer.setInterval(5000L, checkGPS);
config1.setEventHandler(handleEvent_call);
config2.setEventHandler(handleEvent_sms);
call_button.init(Call_Button);
sms_button.init(SMS_Button);
}
void checkGPS()
{
if (gps.charsProcessed() < 10)
{
//Serial.println(F("No GPS detected: check connections again."));
Blynk.virtualWrite(V4, "GPS ERROR");
}
}
void loop()
{
while (Serial.available() > 0)
{
if (gps.encode(Serial.read()))
displayInfo();
}
Blynk.run();
timer.run();
sms_button.check();
call_button.check();
}
void displayInfo()
{
if (gps.location.isValid() )
{
latitude = (gps.location.lat()); //Storing the Lat. and Lon.
longitude = (gps.location.lng());
//Serial.print("LAT: ");
//Serial.println(latitude, 6); // float to x decimal places
//Serial.print("LONG: ");
//Serial.println(longitude, 6);
Blynk.virtualWrite(V1, String(latitude, 6));
Blynk.virtualWrite(V2, String(longitude, 6));
myMap.location(move_index, latitude, longitude, "GPS_Location");
speed = gps.speed.kmph(); //get speed
Blynk.virtualWrite(V3, speed);
direction = TinyGPSPlus::cardinal(gps.course.value()); // get the directions like east west north south
Blynk.virtualWrite(V4, direction);
satellites = gps.satellites.value(); //get number of satellites
Blynk.virtualWrite(V5, satellites);
}
//Serial.println();
}
void handleEvent_sms(AceButton* /* button */, uint8_t eventType,
uint8_t /* buttonState */) {
switch (eventType) {
case AceButton::kEventPressed:
// Serial.println("kEventPressed");
message_with_data = message + "Latitude = " + (String)latitude + "Longitude = " + (String)longitude;
modem.sendSMS(mobile_number, message_with_data);
message_with_data = "";
break;
case AceButton::kEventReleased:
//Serial.println("kEventReleased");
break;
}
}
void handleEvent_call(AceButton* /* button */, uint8_t eventType,
uint8_t /* buttonState */) {
switch (eventType) {
case AceButton::kEventPressed:
// Serial.println("kEventPressed");
modem.callNumber(mobile_number);
break;
case AceButton::kEventReleased:
//Serial.println("kEventReleased");
break;
}
}