I’m new to creating my own code for BLYNK.
I decided to use C ++ to build my own code using virtual pins because they are very useful, right.
I would like to ask you for help in optimizing my code or improving it.
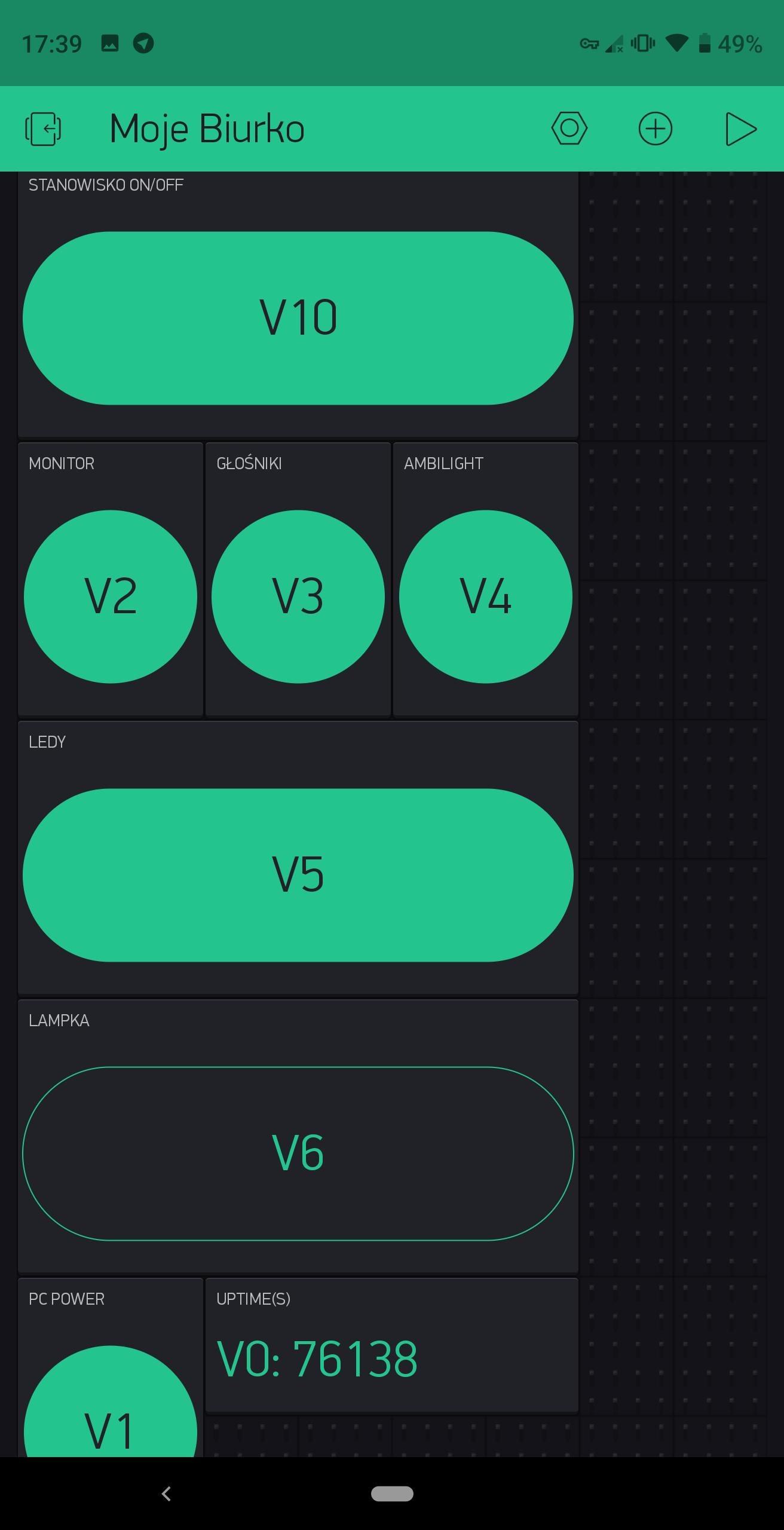
For now everything works as it should, I use my project to control the 8 channel switch (2 channels are empty, I use only 6).
Pin V10 controls pins V2, V3, V4, pin V10 is switched on then these 3 are turned on etc.
I have a question if I can use the Blynk.sync () command; for the selected pin, for example:
Blynk.sync (V2); or Blynk.sync (V2, V3, V4);
Thank u
//#define BLYNK_DEBUG
#define BLYNK_PRINT stdout
#ifdef RASPBERRY
#include <BlynkApiWiringPi.h>
#else
#include <BlynkApiLinux.h>
#endif
#include <BlynkSocket.h>
#include <BlynkOptionsParser.h>
static BlynkTransportSocket _blynkTransport;
BlynkSocket Blynk(_blynkTransport);
static const char *auth, *serv;
static uint16_t port;
#include <BlynkWidgets.h>
BlynkTimer tmr;
BLYNK_CONNECTED() {
Blynk.syncAll();
}
BLYNK_WRITE(V10) {
if (param[0] == 1) {
Blynk.virtualWrite(V2, 1);
Blynk.virtualWrite(V3, 1);
Blynk.virtualWrite(V4, 1);
if (digitalRead(17) == LOW) {
printf("Monitor: ON\n");
digitalWrite(17, HIGH);
}
if (digitalRead(27) == LOW) {
printf("Głośniki: ON\n");
digitalWrite(27,HIGH);
}
if (digitalRead(22) == LOW) {
printf("Ambilight: ON\n");
digitalWrite(22, HIGH);
}
} else {
Blynk.virtualWrite(V2, 0);
Blynk.virtualWrite(V3, 0);
Blynk.virtualWrite(V4, 0);
if (digitalRead(17) == HIGH) {
printf("Monitor: OFF\n");
digitalWrite(17, LOW);
}
if (digitalRead(27) == HIGH) {
printf("Głośniki: OFF\n");
digitalWrite(27, LOW);
}
if (digitalRead(22) == HIGH) {
printf("Ambilight: OFF\n");
digitalWrite(22, LOW);
}
}
}
BLYNK_WRITE(V1) {
if (param[0] == 1) {
printf("PC power: OFF\n");
digitalWrite(18, HIGH);
} else {
printf("PC power: ON\n");
digitalWrite(18, LOW);
}
}
BLYNK_WRITE(V2) {
if (param[0] == 1) {
printf("Monitor: ON\n");
digitalWrite(17, HIGH);
} else {
printf("Monitor: OFF\n");
digitalWrite(17, LOW);
}
if (digitalRead(17) == LOW && digitalRead(27) == LOW && digitalRead(22) == LOW)
Blynk.virtualWrite(V10, 0);
else if (digitalRead(17) == HIGH && digitalRead(27) == HIGH && digitalRead(22) == HIGH)
Blynk.virtualWrite(V10, 1);
}
BLYNK_WRITE(V3) {
if (param[0] == 1) {
printf("Głośniki: ON\n");
digitalWrite(27, HIGH);
} else {
printf("Głośniki: OFF\n");
digitalWrite(27, LOW);
}
if (digitalRead(17) == LOW && digitalRead(27) == LOW && digitalRead(22) == LOW)
Blynk.virtualWrite(V10, 0);
else if (digitalRead(17) == HIGH && digitalRead(27) == HIGH && digitalRead(22) == HIGH)
Blynk.virtualWrite(V10, 1);
}
BLYNK_WRITE(V4) {
if (param[0] == 1) {
printf("Ambilight: ON\n");
digitalWrite(22, HIGH);
} else {
printf("Ambilight: OFF\n");
digitalWrite(22, LOW);
}
if (digitalRead(17) == LOW && digitalRead(27) == LOW && digitalRead(22) == LOW)
Blynk.virtualWrite(V10, 0);
else if (digitalRead(17) == HIGH && digitalRead(27) == HIGH && digitalRead(22) == HIGH)
Blynk.virtualWrite(V10, 1);
}
BLYNK_WRITE(V5) {
if (param[0] == 1) {
printf("Ledy: ON\n");
digitalWrite(23, HIGH);
} else {
printf("Ledy: OFF\n");
digitalWrite(23, LOW);
}
}
BLYNK_WRITE(V6) {
if (param[0] == 1) {
printf("Lampka: ON\n");
digitalWrite(24, HIGH);
} else {
printf("Lampka: OFF\n");
digitalWrite(24, LOW);
}
}
void setup() {
pinMode(18, OUTPUT);
pinMode(17, OUTPUT);
pinMode(27, OUTPUT);
pinMode(22, OUTPUT);
pinMode(23, OUTPUT);
pinMode(24, OUTPUT);
Blynk.begin(auth, serv, port);
tmr.setInterval(1000, [](){
Blynk.virtualWrite(V0, BlynkMillis()/1000);
});
}
void loop() {
Blynk.run();
tmr.run();
}
int main(int argc, char* argv[]) {
parse_options(argc, argv, auth, serv, port);
setup();
while (true) {
loop();
}
return 0;
}
On the app it looks like this: