Hello! and a very good day 
I am using: Arduino mega, ESP8266 Wifi Shield, Ultrasonic Sensors, Line Sensors. The blynk app is on an iphone. Currently on the blynk server.
Here is the code I currently have. Without blynk the code works perfectly. however I would like to do some controlling over the robot which is why I opted for blynk. But, with blynk the sensors can’t be read simultaneously. Thus distoring the robot. May I know what can I do? Is there a blynk time function that can run the sensors simultaneously? Or would local server help?
#define BLYNK_PRINT Serial
#include <ESP8266_Lib.h>
#include <BlynkSimpleShieldEsp8266.h>
#include "CytronMotorDriver.h"
// Auth Token in the Blynk App.
char auth[] = "5IBnOryca8MRxGRKl3Q5L-UIi150HjGe";
// WiFi credentials.
char ssid[] = "arisssa_2.4g@unifi";
char pass[] = "qistina2017";
// Software Serial
#include <SoftwareSerial.h>
SoftwareSerial EspSerial(10, 11); // RX, TX
// ESP8266 baud rate:
#define ESP8266_BAUD 9600
ESP8266 wifi(&EspSerial);
// BLYNK Timer
BlynkTimer timer;
int StartDoTimer;
//Pin declaration for SHIELD-2AMOTOR
CytronMD motor1(PWM_DIR, 5, 4); // PWM 1 = Pin 3, DIR 1 = Pin 4.
CytronMD motor2(PWM_DIR, 6, 7); // PWM 2 = Pin 9, DIR 2 = Pin 10.
//Pin declaration for LSS05
#define LSS05_O1 A1 // Pin A1 is connected to O1 (LSS05)
#define LSS05_O2 A2 // Pin A2 is connected to O2 (LSS05)
#define LSS05_O3 A3 // Pin A3 is connected to O3 (LSS05)
#define LSS05_O4 A4 // Pin A4 is connected to O4 (LSS05)
#define LSS05_O5 A5 // Pin A5 is connected to O5 (LSS05)
// Ultrasonic Pin Declaration
#define Lechopin A14 // echo pin
#define Ltrigpin A15// Trigger pin
#define Mechopin A12 // echo pin
#define Mtrigpin A13// Trigger pin
#define Rechopin A10 // echo pin
#define Rtrigpin A11// Trigger pin
long duration, distance, RightSensor, BackSensor, FrontSensor, LeftSensor;
int setdist = 20;
// BLYNK system
int buttonA;
WidgetLCD lcd(V3);
void setup()
{
// Debug Console
Serial.begin (9600);
EspSerial.begin(ESP8266_BAUD);
Blynk.begin(auth, wifi, ssid, pass);
// put your setup code here, to run once:
//LSS05 Auto-Calibrating Line Sensor Pin Setup
pinMode(LSS05_O1, INPUT); // Set O1 as input
pinMode(LSS05_O2, INPUT); // Set O2 as input
pinMode(LSS05_O3, INPUT); // Set O3 as input
pinMode(LSS05_O4, INPUT); // Set O4 as input
pinMode(LSS05_O5, INPUT); // Set O5 as input
//Ultrasonic Pin Setup
pinMode (Ltrigpin, OUTPUT);
pinMode (Lechopin, INPUT);
pinMode (Mtrigpin, OUTPUT);
pinMode (Mechopin, INPUT);
pinMode (Rtrigpin, OUTPUT);
pinMode (Rechopin, INPUT);
// Setup a function to be called every HALF second
StartDoTimer = timer.setInterval(100L, System);
timer.disable(StartDoTimer); // Turn off StartDoTimer
}
void System()
{
int sensor = 0;
sensor = LSS05Reading(); // Reading LSS05 sensor
Linefollow();
//Ultrasonic
SonarSensor(Rtrigpin, Rechopin);
RightSensor = distance;
SonarSensor(Ltrigpin, Lechopin);
LeftSensor = distance;
SonarSensor(Mtrigpin, Mechopin);
FrontSensor = distance;
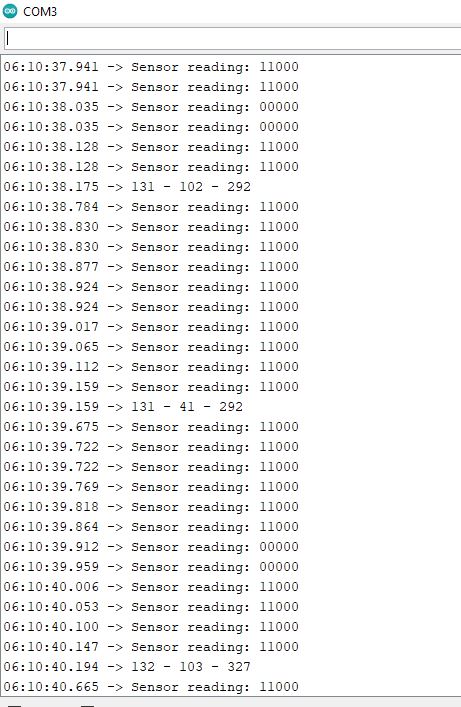
Serial.print(LeftSensor);
Serial.print(" - ");
Serial.print(FrontSensor);
Serial.print(" - ");
Serial.println(RightSensor);
Blynk.virtualWrite(V0, FrontSensor);
Blynk.virtualWrite(V1, LeftSensor);
Blynk.virtualWrite(V2, RightSensor);
}
int LSS05Reading()
{
int LSS05Data = 0;
LSS05Data = digitalRead(LSS05_O5) +
(digitalRead(LSS05_O4) * 2) +
(digitalRead(LSS05_O3) * 4) +
(digitalRead(LSS05_O2) * 8) +
(digitalRead(LSS05_O1) * 16);
Serial.print("Sensor reading: ");
if (LSS05Data < 0b00010) {
Serial.print("0000");
}
else if (LSS05Data < 0b00100) {
Serial.print("000");
}
else if (LSS05Data < 0b01000) {
Serial.print("00");
}
else if (LSS05Data < 0b10000) {
Serial.print("0");
}
Serial.println(LSS05Data, BIN);
return LSS05Data;
}
void Linefollow()
{
int sensor = LSS05Reading();
if (sensor == 0b01110 ||
sensor == 0b00100)
{
motor1.setSpeed(60); // Motor 1 runs forward at 50% speed.
motor2.setSpeed(60); // Motor 2 runs backward at 50% speed.
}
else if (sensor == 0b01100)
{
motor1.setSpeed(60); // Motor 1 runs forward at 50% speed.
motor2.setSpeed(40); // Motor 2 runs backward at 50% speed.
}
else if (sensor == 0b01000)
{
motor1.setSpeed(60); // Motor 1 runs forward at 50% speed.
motor2.setSpeed(30); // Motor 2 runs backward at 50% speed.
}
else if (sensor == 0b10000 ||
sensor == 0b11000 ||
sensor == 0b11100 ||
sensor == 0b11110)
{
motor1.setSpeed(60); // Motor 1 runs forward at 50% speed.
motor2.setSpeed(0); // Motor 2 runs backward at 50% speed.
}
else if (sensor == 0b00110)
{
motor1.setSpeed(40); // Motor 1 runs forward at 50% speed.
motor2.setSpeed(60); // Motor 2 runs backward at 50% speed.
}
else if (sensor == 0b00010)
{
motor1.setSpeed(30); // Motor 1 runs forward at 50% speed.
motor2.setSpeed(60); // Motor 2 runs backward at 50% speed.
}
else if (sensor == 0b00001 ||
sensor == 0b00011 ||
sensor == 0b00111 ||
sensor == 0b01111)
{
motor1.setSpeed(0); // Motor 1 runs forward at 50% speed.
motor2.setSpeed(60); // Motor 2 runs backward at 50% speed.
}
}
void SonarSensor(int trigPin, int echoPin)
{
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration / 2) / 29.1;
}
void loop()
{
Blynk.run();
timer.run();
}
BLYNK_WRITE(V8) // Button A = Location A
{
int buttonA = param.asInt(); // read button
if (param.asInt() == 1)
{
lcd.clear();
lcd.print(4, 0, "Heading to");
lcd.print(4, 1, "Location A");
Serial.println("V1 is ON");
timer.enable(StartDoTimer);
}
else if (param.asInt() == 0)
{
Serial.println("V1 is OFF");
timer.disable(StartDoTimer);
motor1.setSpeed(0); // Motor 1 runs forward at 50% speed.
motor2.setSpeed(0); // Motor 2 runs backward at 50% speed.
}
}
 Would adding another timer help?
Would adding another timer help?