I recall another topic with a big “don’t want to do it this way” run around… but end result is to use the one main .ino file with all the #include headers and then using IDE tabs (sorry I don’t know all the proper technical terms) with their associated files, like this…
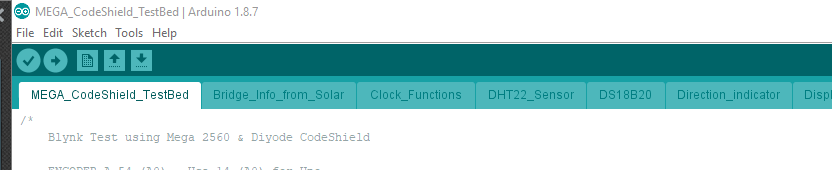
Not entirely sure if your issue is the same or not, but hopefully this info helps in your determination on how to use it, or work around it.