Stepper Motor Drivers – technology shift …
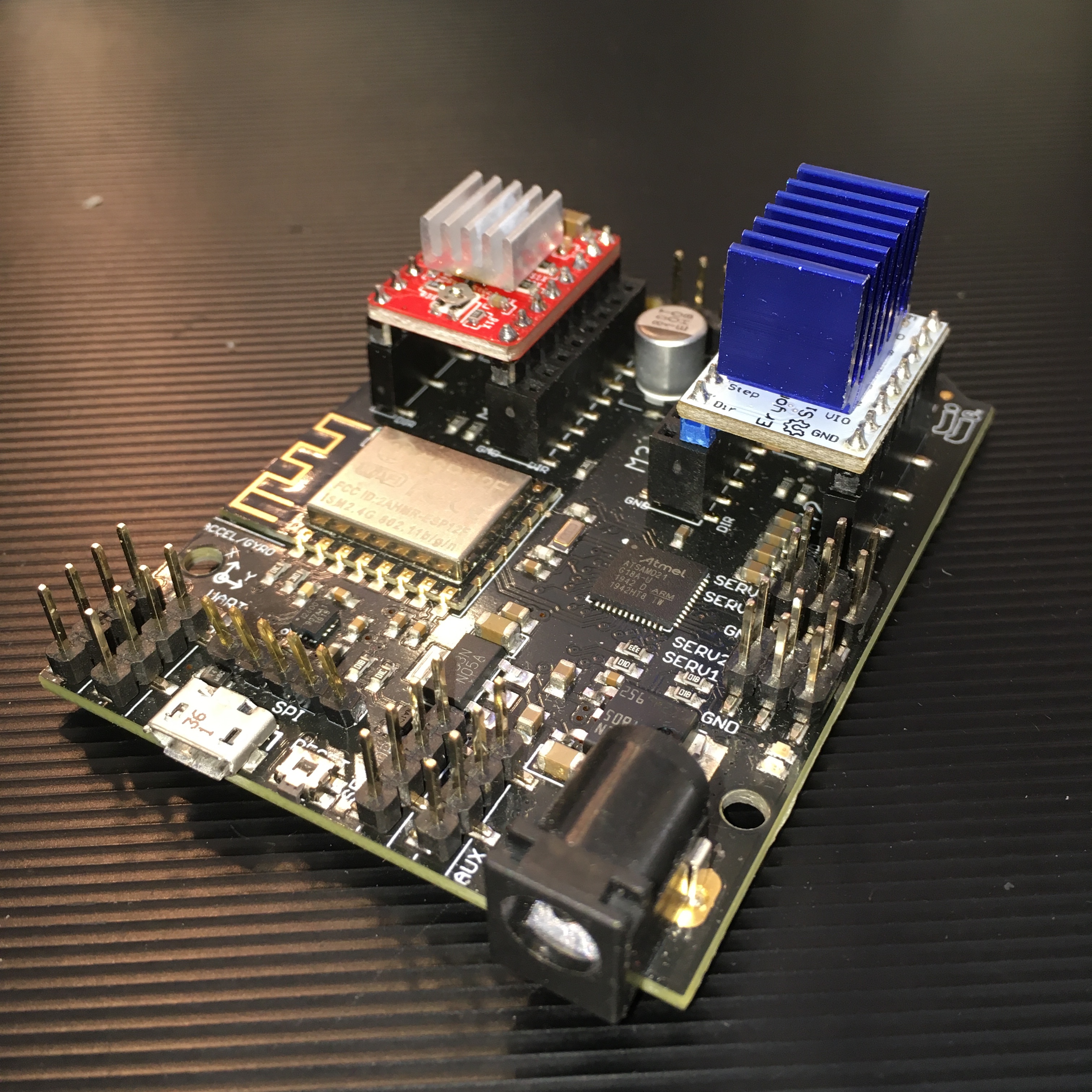
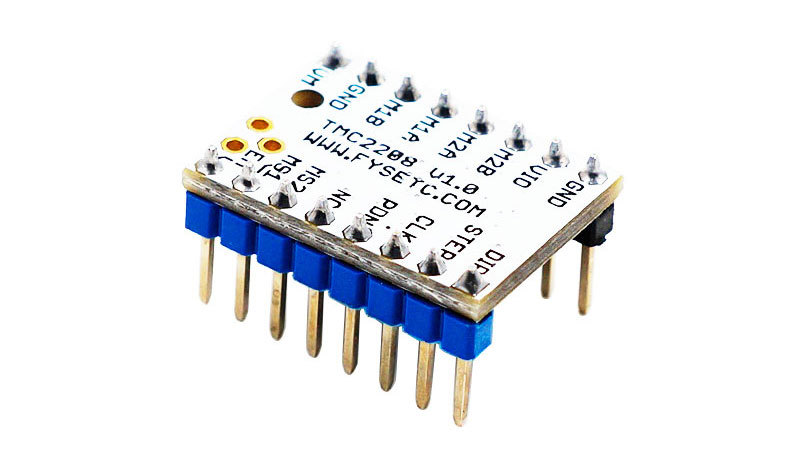
The older classic A4988 board has been updated with the newer TMC2208 board. Pictured below is a Devia Controller board with two stepper motor drivers installed for comparison. The red one on the left with the small aluminum heatsink is the older A4988; the white one on the right with the larger blue aluminum heatsink is the TMC2208. If you made a camera slider in the past and thought it seemed “noisy” while running, the newer ultra-quiet driver can help.
See the product Wiki website at: TMC2208 Wiki.
1 Like